



概要
- 開放制御インタフェースを備えた高度6軸ロボットマニピュレータ
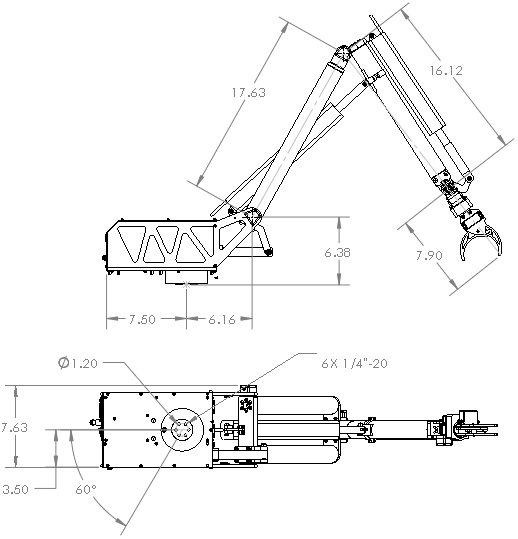
- 各直径2.2メートルのリーチ、持ち上げ能力4.5kg(10ポンド)
- 電源がオフの低い4つのジョイントで位置を保持します
- CNC加工アルミニウムおよびカーボンファイバー構造
高度ロボットマニピュレータ(ARM 3.0) - オープンループ は、開放制御インターフェースを備えた6軸ロボットアームで、その他のプロジェクトに簡単に実装できます。各ジョイントは、RC PWM信号を介して位置決めするように命じられています。カーボンファイバーセグメントとCNCで機械加工された航空機用アルミニウムのお陰で、ARM 3.0は堅牢なユニットです。直径が2メートルを超え、持ち上げ能力が4.5kg(10ポンド)と、非常に高いARM値です。ARM 3.0は、ARM 2.0をより優れた位置センサ、より堅牢なリニアアクチュエータ、より強力なモータコントローラで改良しています。

この6自由度アームはリニアアクチュエータとロータリーサーボを使用して、直径7フィート以上の操作エンベロープを提供します。シールされたボールベアリングは、各ジョイントで精密な動きをします。下の4つのジョイントは、正確で線形な制御のために絶対値エンコーダを使用しています。フル容量での典型的な電流消費は約7アンペアです。ベースジョイントの回転速度は60度/秒です。手首は2.3秒で240度回転します。グリッパは全開から全閉まで1秒未満で動きます。逆電力保護と過電流保護がユニットに内蔵されています。電源スイッチが緑色のLED「オン」の状態の電源スイッチが電子機器エンクロージャにあります。

開ループ速度制御
このバージョンのARMのすべてのジョイントは開ループ速度モードで動作します。このARMは、ジョイスティックやラジオコントロールで使用すると最も使いやすく、操作者が直接ARMをコントロールすることができます。ラジオやジョイスティックに接続すると、このARMはジョイスティックが中央位置にある場合にその位置を保持し、操作者がジョイスティックを中央から動かすと動き始めます。ジョイスティックが中央から移動するほど、ARMはより速く動きます。ジョイスティックを他の方向に動かすと、ARMは方向を逆にします。このバージョンのARMは、12VDC電源と標準RCラジオを入力コネクタに接続することで、すぐに使用できます。

特徴
- 各ジョイントからの絶対値、線形フィードバック
- リニアアクチュエータの移動終了箇所にリミットスイッチ
- 頑丈なアルミニウムエンクロージャが制御電子機器を収容
- 電源と信号入力用のDB-25コネクタ
- ベースのオン/オフ電源スイッチ
- カーボンファイバーセグメント
- CNC加工アルミ構造
- 従来のラジオコントロールユニットと互換性
- 電源表示LED
- 12VDC電源
- 逆接続保護
用途
- ロボット制御研究プロジェクト
- 大学エンジニアリングラボ
- 無人陸上車両マニピュレーター
- ロボットコンテスト
- 危険な環境での製品のテスト
PDFファイル
- リーチエンベロープ:直径86.6インチ(2.2m)
- リフト容量:完全に伸ばした状態で10 lbs(4.5 kg)
- 自由度:6
- インタフェース:RC PWM
- 重量:20.4ポンド(9.2 kg)
- 入力:12VDC、7.5Aピーク