













概要
- BlueROV2 (アクリル - 100m)
- 高解像度の広角低照度カメラを搭載
- 調光可能なライトで最大6,000lmをサポート
- 正確な動きを実現する特許取得済みのT2スラスタを採用
- アクリル製の筐体で100mまで操作可能
- 拡張性を考慮したモジュラーフレーム設計を採用
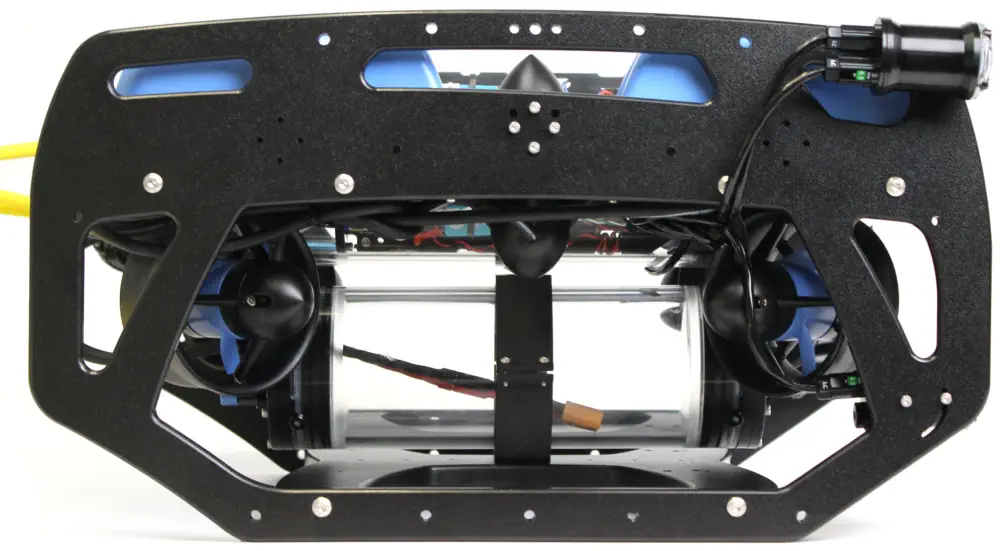
BlueROV2 (アクリル - 100m) は、柔軟性と拡張性で定評のある、手頃な価格で高性能な水中遠隔操作車両 (ROV) です。6基 および 8基のスラスタ構成が用意されており、さまざまなアクセサリをサポートし、オープンソースソフトウェアで動作するため、水中ドローンの中でも人気の高い選択肢となっています。
BlueROV2は部分的な組み立てが必要で、完了までに約6~8時間かかります。この組み立てプロセスにより、ユーザはシステムコンポーネントを包括的に理解でき、将来のアップグレードや改善が容易になります。
BlueROV2は、チルト機構に取り付けられた高解像度、広角、低照度カメラを搭載しており、パイロットはカメラの傾きを制御して最適な視野角を得ることができます。ROVは、2個 または 4個の調光可能なルーメンライトで構成でき、最大6,000lmで水中環境を照らします。
ROVは、特許取得済みのT2スラスタをベクトル構成で採用し、高い推力対重量比とあらゆる方向への正確な動きを実現します。標準の 6スラスタセットアップは、ヘビー構成レトロフィットキットを使用して 8スラスタに拡張でき、完全な6自由度制御と強化された安定性を実現します。調整可能なゲインレベルにより、低速での精密制御と高出力が実現し、流れをナビゲートして重い荷物を運ぶことができます。
BlueROV2は、アクリルプラスチック または 陽極酸化アルミニウム製の筐体で構成できます。アクリル製の筐体は 100m (328フィート) の深さまで耐えられますが、アルミニウム製の筐体は最大300m (984フィート) の深さまで耐えられます。高品質の部品で作られたROVには、各潜水前に適切な密閉を保証するための真空テストポンプが含まれています。
モジュラフレームで設計されたBlueROV2は、堅牢で拡張性に優れており、ROVグリッパやスキャンソナーなどのさまざまなアクセサリを取り付けることができます。ペイロードスキッドを使用すると、フレームを拡張してより大きなペイロードを取り付けたり、科学機器や追加のバッテリエンクロージャなどを収容したりできます。ユーザは標準フレームを変更して、特定のアプリケーションに合わせたカスタム水中ロボットを作成できます。
BlueROV2は、Navigator フライトコントローラと BlueOSを搭載しています。ROV専用のコントローラである Navigator には、慣性測定ユニット (IMU)、磁力計、リークセンサなどのオンボードセンサが搭載されています。スラスタ、ライト、グリッパ、その他のアクセサリを接続するための 16個の出力と、センサやソナー用の複数の通信ポートを備えています。Raspberry Pi 4コンピュータと組み合わせたNavigatorは、BlueOSを実行し、車両制御、カメラ、テザー接続を管理し、ソフトウェアの更新を容易にします。
パイロットは、オープンソースの QGroundControlアプリケーションをユーザインタフェースとして使用し、ラップトップ コンピュータとゲームパッド コントローラを介して ROVを制御します。このアプリケーションは、ライブビデオストリーム、センサフィードバック および 構成設定を提供します。
BlueROV2は、カスタマイズと拡張のためのさまざまなオプションを提供し、初心者から上級者まで ROVユーザに適します。
- 1 x BlueROV2 (アクリル - 100m)

- 低照度対応 1080p 解像度 30fpsの高解像度広角カメラ
- 調光可能なルーメンライト、最大出力6,000lm
- 操縦性を高めるベクトル構成の特許取得済みT2スラスタ
- デバイスの精密制御のための調整可能なゲインレベル
- アクリル製の筐体で最大100mの深度に耐えます
- モジュラフレーム設計により拡張性を実現
- Navigatorフライトコントローラと BlueOSソフトウェアによって制御されます
- オンボードセンサにはIMU、磁力計、リークセンサなどが含まれます
- スラスタ、ライト、グリッパなどのさまざまなアクセサリに使用できる16の出力
- 処理 および 計算タスク用 Raspberry Pi 4コンピュータを搭載
- ユーザインタフェースにはオープンソースのQGroundControlアプリケーションを使用