







このバンドル品に含まれるもの
- 1 X RB-Lyn-739 - Lynxmotion A-ポッドヘキサポッドロボットキット(ハードウェアのみ)
- 25 X RB-Hit-29 - HS-645MG サーボモータ
概要
- フレーム、ハードウェア、サーボ付き基本型Aポッドヘキサポッドロボット
- 3 DOF(自由度)と傾斜した脚部で動作の範囲を広げることを可能にします
- PVCと高品質アルミサーボエレクターセットブラケットで構成
- 耐久性のあるアルミとプラスチック部品が含まれています
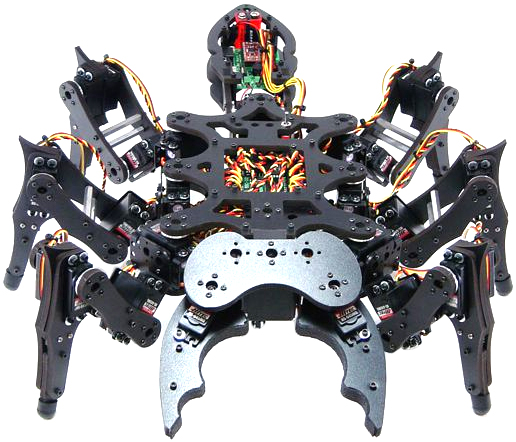
Lynxmotion A-ポッドヘキサポッドロボットキット(電子機器なし) は昆虫からインスピレーションを得ています。 角度のついた脚が動きの範囲をさらに広めます。 3DOF(自由度)の脚部デザインとは、ロボットがどの方向にでも歩行できることを意味します。 ロボットは18 HS-645のサーボを脚用に、さらに追加で7つのサーボを頭部と尻尾に使うように設計されています。 実際に動作している様は本当に見物です。

ロボットの操作
サーボパルス生成とシーケンス運動のタイミングをSSC-32(特に多脚型ロボットに強く推奨されています)にオフロードすることで、このマイクロコントローラには他にもすごい機能をこなすのに十分なパワーを持ち合わせています。 PhoenixプログラムはBotBoarduinoに対応し、ロボットに可変的なスピードをを与えることで、どんな方向(転換)にも、定位置での方向転換(回転)を可能にし、さらに2つを自由に組み合わせることもできます。 歩行速度と同様に、脚の持ち上げの高さと最低地上高の調節が可能です。 すべての軸で本体を回転させることができます。 プリセットの歩行モードと歩調から選択できます。 これら全ては、コントローラからアクセス可能です。 Phoenixコードはさらにロボットの制御においてシリアルコントロールモードに対応し、シリアル接続での操作を可能にします。
機械的な仕組み
このロボットは強固で高品質なアルミニウムサーボエレクターセットブラケットから構成されています。
- Aポッド本体キット
- Aポッド下顎キット
- Aポッド尻尾キット
- Aポッド脚部一組 x3
- SEA-01 サーボ延長ケーブル - 6インチ (15.2cm) x6
- SEA-03 サーボ延長ケーブル - 24インチ x1
- HS-645MG サーボモータ (133 oz. in.) x25 標準サーボ
必要部品(別売)
- BotBoarduinoまたは他のマイクロコントローラ
- SSC-32サーボコントローラ
- USBデータ転送ケーブル
- サイズ (全体): 24.25 インチ(L) x 17.00 インチ(W) x 最大8.50インチ(H)
- サイズ (本体): 9.375 インチ(L) x 6.625インチ(W) x 2.50インチ(H)
- 重量 (電池なし): 6lb 4oz.
ウェブサイト
- サーボモーションコントロール:ローカル閉ループ
- 操縦:無指向性
- 脚数:6
- 一脚あたりの自由度:3
- 運動速度:10 インチ / S
- 地上高:最大7.50 インチまで
電源オプション互換性
- 充電器:ニッカド&ニッケル水素ユニバーサルスマート充電器
- 電池: 6.0 ボルト ニッケル水素 1600mAh/2800mAh 電池パック