







概要
- Lynxmotion SES-V2 ロボティックアーム(4自由度)スマートサーボキット付属
- STEM教育およびホビーロボティクス向けに設計されています
- アルミニウム、カーボンファイバー、G10部品によるモジュラー設計
- Lynxmotion Smart Servo(LSS)モーターを使用
Lynxmotion(LSS)- LSS FlowArm アプリ(ダウンロード) - Robot Operating System 2(ROS2)に対応
- 組み立てが必要ですが、組み立て済みバージョンも
こちら でご利用いただけます
注記:外観用シェルは現在ご利用いただけません。
Lynxmotion SES-V2 ロボティックアーム(4自由度)スマートサーボキット付属は、Lynxmotion社による第6世代の多関節ロボティックアームです。本製品は未組立キットであり、産業用ロボットアームのホビー/スケールモデルとして設計されています。完全に設定可能なLynxmotion Smart ServoモーターおよびLynxmotion Servo Erector Set(SES v2)モジュラー構造システムを基盤としています。
 スマートサーボキット付き")
この多用途な構成により、追加のブラケット、電子部品、センサーなどを用いたカスタマイズや拡張が容易であり、自由度の追加やグリッパーの変更も簡単に行えます。
 スマートサーボキット付き")
LSS多関節アーム(シェル有・無)
注記:外観用シェルは現在ご利用いただけません。
机上での開発や実験に最適ですが、モバイルロボットへの搭載も容易であり、XT60コネクタ付き3S(11.1V)LiPoバッテリー(別売)で駆動可能です。付属のLSSアダプター電子基板により、Arduinoシールド互換ボード、Raspberry Pi、XBee、その他シリアルデバイスへの接続が簡単に行えます。
 スマートサーボキット付き")
LSS多関節アームを搭載したLyxmotionモバイルプラットフォーム
CAD設計ファイルや、ArduinoおよびPythonを用いたサンプルも提供されており、学生やホビイストが本アームを自身のプロジェクトに統合することが可能です。グラフィカルユーザーインターフェースであるLSS FlowArm(FlowBotics Studioを使用して作成)により、シーケンスの記録や再生も容易です。
 スマートサーボキット付き")
LSS FlowArm グラフィカルユーザーインターフェース
Lynxmotion Smart Servoモーターは、多関節ロボット関節用に設計・最適化されており、使いやすさも重視されています。カスタムLSS通信プロトコルは人間が読みやすく、全二重通信(専用TxおよびRxライン)および選択可能なボーレートを採用しています。各サーボの特性(最大速度や角度範囲、角加速度、保持剛性など)を変更することで動作を最適化できます。各サーボは、絶対エンコーダからのセンサーフィードバック(位置、速度など)、電流、電圧、温度など、多様なリアルタイム値や設定値の取得・設定が可能です。
LSS-ROS2-Armsは、物理的またはシミュレートされたSES V2アーム(4自由度または5自由度バージョン)を制御できる完全オープンソースのROSパッケージです。
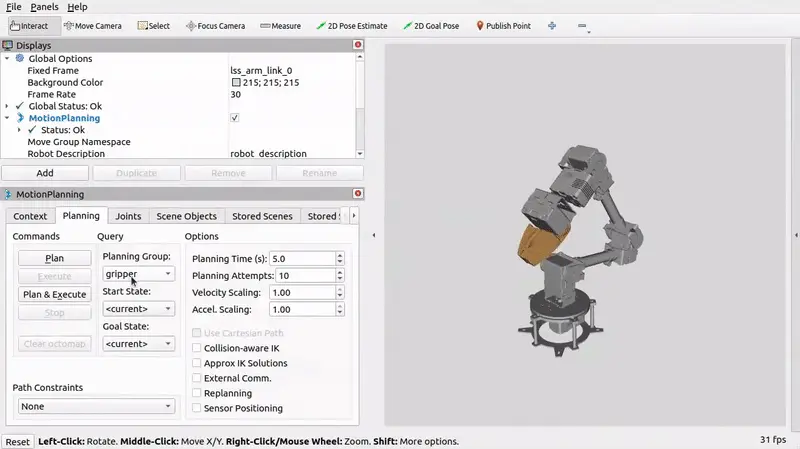
SES-V2 ロボティックアーム ROS2使用例
特長
- 5個の完全設定可能なモジュラー型スマートサーボモーター
- モジュラー型アルミニウムブラケット、カーボンファイバーチューブ等
- V型グリッパーは0度から180度まで開閉可能
- Lynxmotion Servo Erector Set電子部品と互換性あり
- ハンドヘルドティーチモード、座標指定、バーチャルアームによるシーケンス作成
- 過電流・温度・電圧に対する安全機能を内蔵
- 分かりやすく人間が読みやすいLSS通信プロトコル
- LSS ST1 アクチュエーター 3 個
- LSS HT1 アクチュエーター 2 個
- LSS Adapter(エレクトロニクスインターフェース)
- 12 V 壁用アダプター(オン/オフスイッチ付き)
- USB ケーブル
- 必要なすべてのブラケット、フレーム部品およびハードウェア
- ドライバー(プラス PH1、PH2)
- 可動範囲: 401.80 mm
- 回転範囲: 360° / ケーブル長さにより制限あり
 スマートサーボキット付き")
- 可動軸: 4+1自由度 (グリッパ)
- 最大水平可動範囲: 約400mm
- 最大垂直可動範囲: 約500mm
- 最大積載荷重: 100g (最大重量)
- 電源入力: 110V〜240V AC 50/60Hz AC (米国タイプ Aプラグ)
- 電源出力: XT60コネクタ搭載 12V 6A DC
- 重量: 650 g
アクチュエータ
| 部位 | タイプ | 静的トルク | 最高速度 |
| ベース | ST1 | 14Kg・cm | 360°/秒 |
| ショルダ | HT1 | 29Kg・cm | 360°/秒 |
| 肘 | HT1 | 29Kg・cm | 360°/秒 |
| 手首 | ST1 | 14Kg・cm | 360°/秒 |
| グリッパ | ST1 | 14Kg・cm | 360°/秒 |
低電圧で動作させると、トルクと速度が低下しますのでご注意ください。
その他 Lynxmotion製品
Lynxmotion(LSS)-LSS FlowArmアプリ(ダウンロード) - Lynxmotionのスマートサーボ
- LynxmotionSESV2部品
FlowBotics Studio (ダウンロード)