")
")
")
")
")
")






支払いとセキュリティ
お客様の決済情報は安全に処理されます。当社はお客様のクレジットカード情報を保存せず、クレジットカード情報にアクセスすることもできません。
概要
- Lynxmotion スマートサーボ PRO Standard (LSS-P-M1)
- 構成可能な、プロフェッショナルなモジュール式スマートサーボモータ
- Lynxmotion サーボエレクタセット PRO (SES-PRO) の一部
- 36Vで最大220Nmの動的トルク
- 波動ギア装置、STM32 マイクロコントローラ、センサフィードバック
![]()

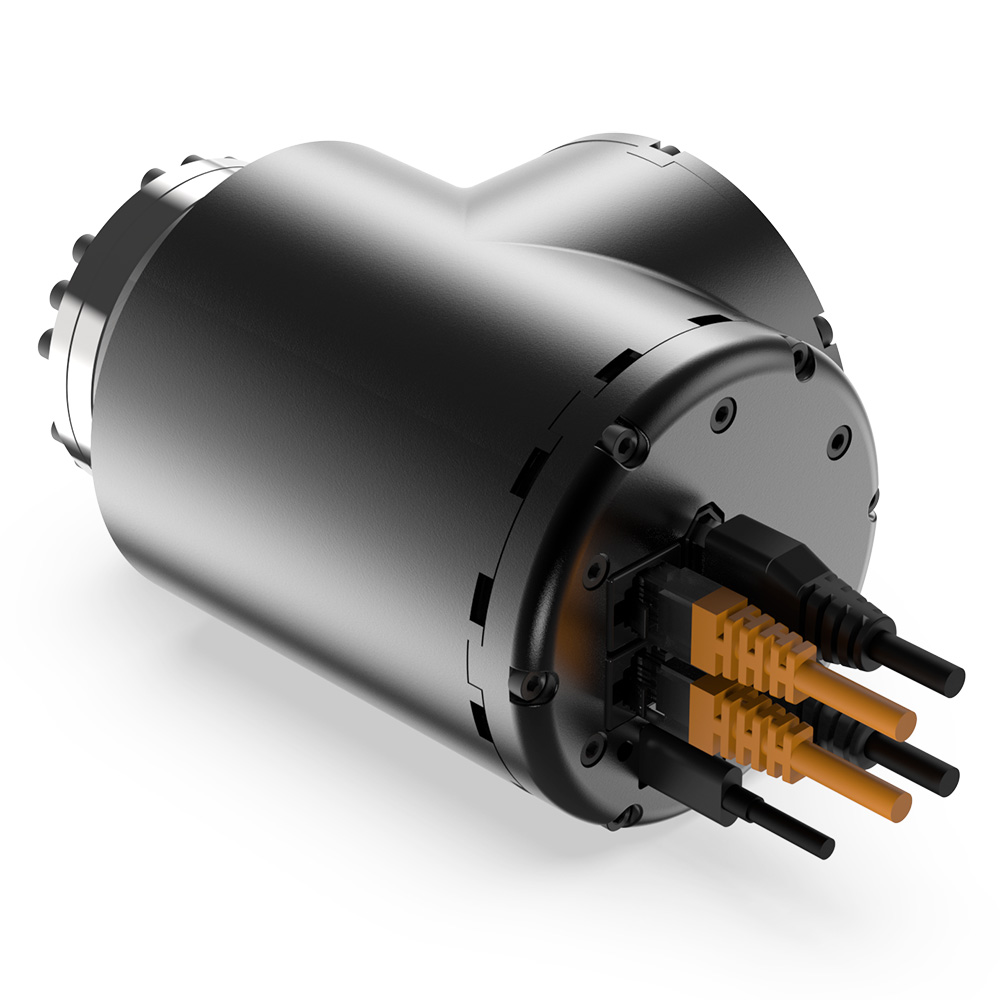
Lynxmotion スマートサーボ PRO Mega モジュラ 波動歯車アクチュエータ (LSS-P-M1) は、 高度な構成が可能なロボットアクチュエータで、Lynxmotion PROシリーズの中で最高のトルクを提供します。主な特徴として、高トルクステッピングモータに連結した波動ギア装置、センサフィードバックと絶対位置決めを含む内臓電子機器 および 多数のサーボをデイジーチェーン接続することが可能です。USBと電源を接続するだけで、すぐに使用できます。LSS PRO Configソフトウェアを使えば、簡単に固有のIDを割り当て、PROサーボをバスに接続できます。

Lynxmotion SES-PRO モジュール式 ロボット組立システム
Lynxmotion スマートサーボ PRO(LSS-P)アクチュエータは、Lynxmotionスマートサーボ(LSS)ホビーシリーズをさらに強力かつ高精度に進化させた多用途アクチュエータで、セミプロフェッショナル または プロフェッショナルな多自由度ロボットアーム、アニマトロニクス、研究プロジェクトなどに使用できます。PROのラインナップには現在 3種類のサーボがあり、そのうちの2種類はキャップとプレートが共通で物理的にはほぼ同じですが、最大トルクと速度、ギアボックスのサイズと取り付け方法が異なります。3番目のアクチュエータは、物理的に3種類の中で最も大きく、トルクも最大です。

Lynxmotion PRO 6軸 ロボット マニピュレータ アームコンセプト
このサーボは、次世代 Lynxmotion サーボエレクタセット プロフェッショナル モジュラ ロボット構築システム(S.E.S. PRO)の基礎となり、様々なモジュールブラケット、機構、電子回路をサーボを中心に設計しています。"スマート "とは、各サーボのパラメータをユーザが変更・構成可能であり、センサフィードバックがあり、安全機能を内蔵し、コンピュータに接続することを想定していますが、CAN通信でマイクロコントローラや機器に接続できることを意味します。カスタムPRO LSSシリアル通信プロトコルは、LSS および SSC-32/32Uプロトコルをベースに構築されており、PROサーボとの通信、制御、設定を簡単かつ直感的に行うことができます。

Lynxmotion PRO 6脚歩行ロボットコンセプト
メインの STM32マイクロコントローラは、カスタムブートローダとカスタムファームウェアをインストール済みで、サーボがPCB上のすべてのコンポーネント(モータコントローラ、CANチップ、USB、IMU)と通信可能になっており、Lynxmotion PRO通信プロトコルを含んでいます。独自のカスタムコード/ファームウェアを作成したい上級ユーザは、Arduino IDE(STMduino経由)と利用可能なテストコードを使用できます。

Lynxmotion PRO ヒューマノイドロボットコンセプト
特徴:
- 低速で高トルクを提供する強力なNEMA 23 ステッピングモータに連結した全金属製波動ギア
- USB入力 および CAN BUS通信
- 人間が判読可能なLSS Pro 通信プロトコル (アクション、クエリ、設定)
- デイジーチェーン接続:RJ45 および XT60
- フィードバック:位置、温度、IMU、動作ステータスなど
- 公称入力電圧:36V
- STM32 マイクロコントローラ、ステッパコントローラ、16bit 磁気エンコーダ
Lynxmotion スマートサーボ PRO 配線
Lynxmotion Smart Servo PRO (LSS-P) アクチュエータは、LSS-P ROS2 ハードウェア インターフェースを通じて ROS2 で完全にサポートされています。この統合により、ROS2 エコシステム内でこれらの高精度モジュール式アクチュエータのシームレスな通信と制御が可能になります。提供されているハードウェア インターフェースを活用することで、ユーザーはさまざまなロボット アプリケーション向けにアクチュエータを簡単に構成、監視、および制御できます。このインターフェースはリアルタイム更新、位置制御、およびフィードバック メカニズムをサポートし、堅牢なパフォーマンスと適応性を保証します。ロボット アーム、モバイル プラットフォーム、またはその他の複雑なシステムを開発している場合でも、Lynxmotion Smart Servo PRO アクチュエータの ROS2 サポートにより、統合が簡素化され、機能が強化され、開発が加速されます。
- 1 x Lynxmotion スマートサーボ PRO Mega アクチュエータ (LSS-P-M1)
- 1 x USBケーブル (A~C)
- 1 x RJ45 通信ケーブル (CAN バス)
- 1 x XT60 電源ケーブル
- 1 x Lynxmotion PRO LSS-P-M1 ケーブルホルダ および ネジ
- 4 x スチール製ソケットヘッドネジ - 黒 - M8 x 18mm - 6.0mm 六角
- 10 x 標準ケーブルタイ - 全体幅 4.8mm、長さ 160mm
- 1 x ボールエンド 六角 Lキー 2.5mm
- 1 x ボールエンド 六角 Lキー 3.0mm
- 1 x ボールエンド 六角 Lキー 6.0mm
- 公称電圧 (推奨):36V
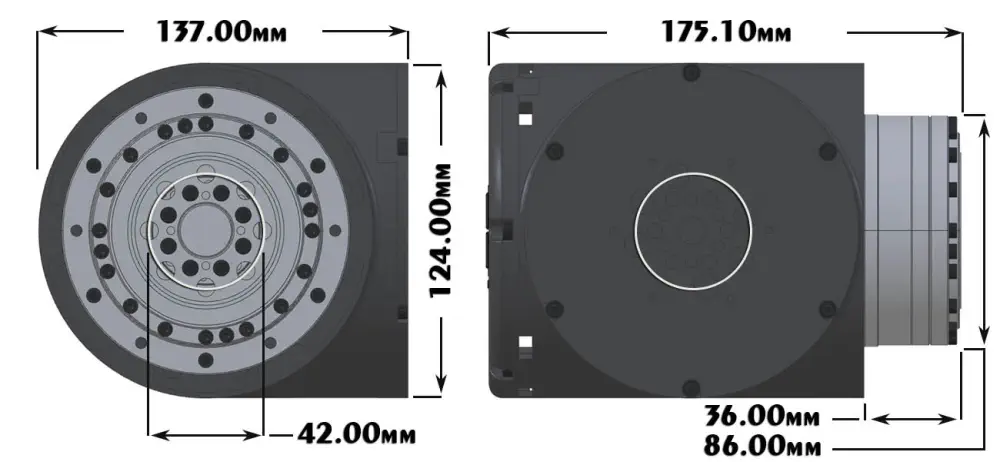
- 最大トルク: 220Nm
- 最大速度: 10rpm または 65度/秒 (50Nm)
- DC モータ:NEMA 23 バイポーラステッパ
- ギア比:1:100
- 通信方式:シリアル (USB 経由) または CAN (バス)
- 通信プロトコル:カスタム Lynxmotion スマートサーボ (LSS)
- 動作角度:360° 絶対 および 仮想マルチターン
- コネクタ:USB、RJ45、XT60
- 重量:4.5kg