





支払いとセキュリティ
お客様の決済情報は安全に処理されます。当社はお客様のクレジットカード情報を保存せず、クレジットカード情報にアクセスすることもできません。
概要
- XGO Mini2 四足歩行 犬型ロボット (追加ロボットアーム付き)
- 12自由度の四足歩行ロボット
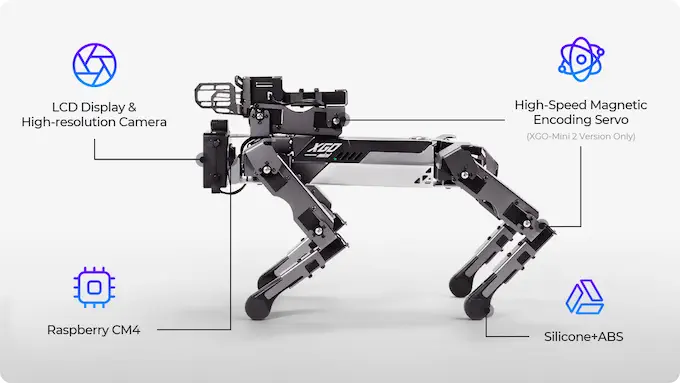
- LCDディスプレイ 高解像度カメラ
- Raspberry CM4モジュール
- 全方向移動
- ワンボタン設計 専用アプリで制御可能
XGO Mini2 四足歩行 犬型ロボットは、12自由度 AIエッジコンピューティング用途向けRaspberry CM4駆動グリッパを備えたデスクトップサイズのAI四足歩行ロボットです。全方向移動 6次元姿勢制御 姿勢安定 複数の動作歩行を実現します。
アップデートされたXGO Mini2は、世界初のアーム付きRaspberry Piデスクトップロボット犬です。これまでにない方法で、世界を発見、探索、そして変化させることができます。
6軸IMU XGO 2関節位置センサ 電流センサを搭載、姿勢フィードバックを提供、アルゴリズムの検証や二次開発に活用できます。
また、Blockly Pythonを使用してコンピュータを介したプログラミングができます。ロボット / プログラミング愛好家にとって、理想的なメタルペットです。

高度なAIインタラクション機能
視覚認識 音声認識 ジェスチャ認識など、フル機能のAIモジュールを搭載しています。本物の犬のように、ユーザーの声を聞き、認識し、反応することができます。

さらに、QRコードデコード 音声分析 感情の識別などもできます。AIエッジコンピューティンググラフィカルプログラミングで、予想をはるかに超える多くの機能を実行できます。
学習モード
学習モードを搭載、各動作の関節位置を記憶し、アクショングループを設定、実行できます。
Raspberry Pi CM4互換
1.5GHz動作クアッドコアCortex-A72 CPU搭載のRaspberry Pi Compute Module 4 (CM4) を搭載しています。デュアルバンド2.4GHz / 5GHz Wi-Fi & Bluetooth 5.0 BLEのワイヤレス接続ができます。マルチタスク用に 2GB / 4GB RAM、OS用に32GB Micro SDカードストレージを備え、起動時間が速く、全体的にスムーズな動作を実現します。
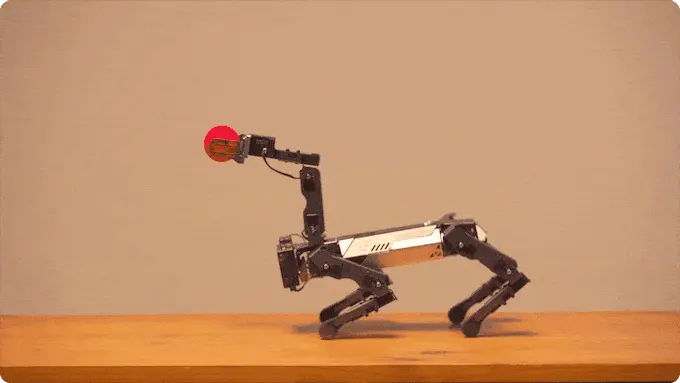
アーム
2.3kg / 4.5kgのシリアルバスサーボ 2.5cm~5.5cmで開くグリッパを備えた3自由度のアームで、さまざまなアイテムをつかむ 持ち上げる 運ぶ 置く 引きずるなどの動作ができます。四足歩行犬型ロボットという枠を超えた可能性がさらに広がります。
12自由度
高性能シリアルサーボ 12個のアクティブ関節 運動学分離を備え、四足動物の動きと姿勢を忠実に再現します。前後左右に自由に駆動し全方向動作を実現、どの方向にも滑らかに歩行します。
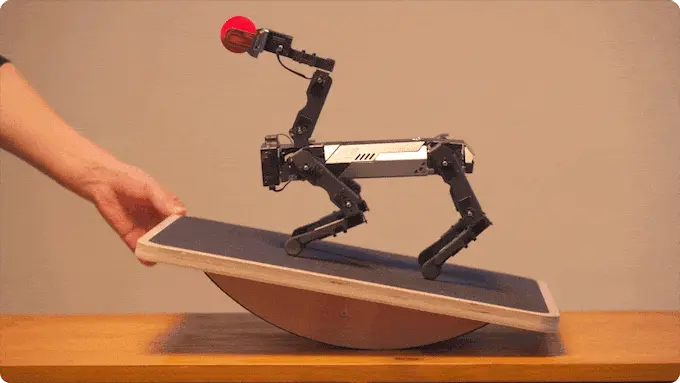
自己安定性能
IMU (慣性計測ユニット) システムを6個搭載、IMUから取得した姿勢データと閉ループ制御を使用することで、バランスを取りづらい環境でも安定した姿勢を維持できます。
足を静止している場合、全身は6自由度の運動制御下にあり、本能的な動きから洗練された動きまで、かつてない機動性と協調性で実現します。
モーショングラフィックスプランニング
常歩 速歩 駈歩の3種の歩行速度とルールがあります。逆運動学アルゴリズムと最適化機械ダイナミクスを組み合わせ、歩行に関する全方向動作制御と体の12自由度動作制御を実現、姿勢と動作の両方をスムーズに制御します。
プログラミング
Raspberry CM4を搭載したXGO 2はオープンソースで、Blocky / Pythonを使用してプログラミングできます。さらに、開発者向けにRobot Operating System (ROS) パッケージも付属しています。初心者でも経験豊富なプログラマでも、簡単に動作 プログラミング学習ができます。
ELECFREAKSとのコラボレーションで、micro:bit / Pico:edとも連携できるようになりました。機能の探索を行い、自身で作成する楽しさを味わうことができます。また、背中にLiDAR LD06、腕にOAK-D-Liteを取り付ければ、拡張することもできます。
- 1 x XGO-Mini2 犬型ロボット
- 1 x 8.4V 1A充電器
- 1 x Micro USBケーブル
- 1 x ユーザーマニュアル
サイズ
- 270 x 150 x 180 mm (長さ x 幅 x 高さ)
- ホスト: Raspberry CM4 4GB SDRAM
- プログラム: Blocky Python ROS
- 1.5mm アルミニウム合金製
- 重量: 915g
- サーボ: 15 x 6V 4.5kg シリアルバスサーボ
- 足: シリコン / ABS製
- マイクロコントローラ: ESP32
- バッテリー: 18650 2S 3500mAh
- 充電器: 8.4V 1A
- 駆動時間: 2時間