





概要
- 電圧:+5V
- DFRobot 3PA および AWD ローバー向けに設計されたエンコーダ
- 車輪に回転角度を提供
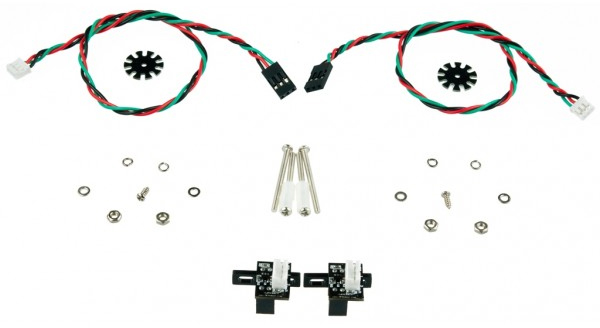
- エンコーダ、プラスチック製チューブ、紙媒介ガスケットなどを同梱
DFRobot ホイール エンコーダ DFRobot 3PA および 4WD ローバー用 (2個パック) は、DFRobot 製 3PA および AWD ローバーのために設計。 お使いの車輪の回転度を与えることができます。 エンコーダは、角度変位信号を変換するために、非接触法を採用しています。 Micro DC ギヤードモーターとベストフィット。 エンコーダ、プラスチック製チューブ、紙媒介ガスケットなどが同梱されています。
ZIPファイル
- 電圧: +5V
- 電流: <20mA
- 分解能:20 PPR
- 重量:20g