











概要
- プログラマブルMecanum駆動ロボットキット
- 完成済みArduinoボード内蔵(ATMega328p)
- 4つのモータの独立制御のための2つのデュアルHブリッジ
- オンボード電圧レギュレータ(バッテリーが1つだけ必要)
- 様々なシールドに対応
- はんだ付けが必要
- リポバッテリーは別売
DFRobotShop Mecanumローバー2.0 - Arduino互換ロボット は、人気の高いArduino Unoマイクロコントローラに基づいた、汎用性の高い移動ロボットです。 ローバーは2つの

DFRobotShopローバー2.0 Arduino互換ロボット は第一世代
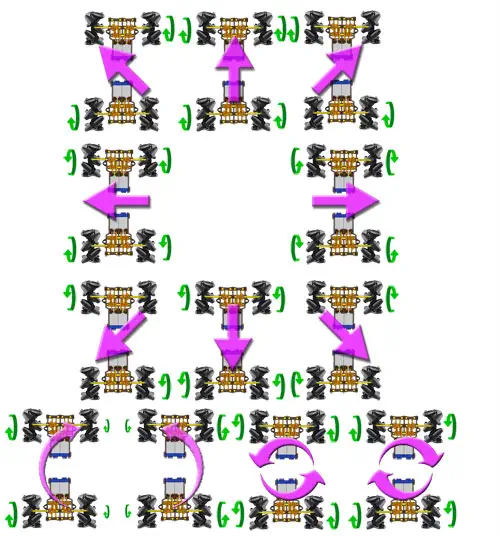
関与する力に起因して、いくつかの方向は他よりも著しく低速であることに注意してください。 例として、前方と後方は左右方向に比べてかなり高速です。 中心点の周りのCW / CCWの回転は2WDローバーよりも長く時間がかかります。
*モーターはタミヤのギヤボックスに含まれていて、5Vまで動作します。 6Vモータは別売です。
** DFRobotShopローバーPCBはデュアルモータコントローラを内蔵し、シールドは別のピンを使用するデュアルコントローラを追加します。4機のDCモータの独立制御が可能です。
- DFRobotShopローバーV2ロボットコントローラx1
-
Mecanum車輪4パック(w/ 金属ハブ) x1
タミヤ ツインモーター ギヤボックス x2 - 左取付具x1
- 右取付具x1
- Arduino用デュアルモーターシールドx1
- タミヤツインモーターギヤボックス用エンコーダペアx2
- DFRobotshopローバーハードウェアx2
リポバッテリーは別売です
PDFファイル
ウェブサイト
フォーラム
ZIPファイル
ブログ