
概要
Lynxmotion SES-V1 FlowArm PLTW Robotic Arm Software
- Lynxmotion SES-V1 FlowArm PLTW Robotic Arm Software(ダウンロード版)
- Lynxmotion AL5D-PLTW ロボットアーム用グラフィカルインターフェース
- Lynxmotion SSC-32 サーボコントローラとのインターフェース
- Project Lead The Way(PLTW)向けに開発
Lynxmotion SES-V1 FlowArm PLTW Robotic Arm Softwareは、ユーザーがLynxmotion AL5Dロボットアームをオフラインおよびリアルタイムで完全に制御できる新しいグラフィカルインターフェースです。ユーザーはアームの複数のビューを確認でき、希望する位置にアームをクリック&ドラッグするだけで、ソフトウェアが逆運動学の計算を自動的に処理します。
Project Lead The Way(PLTW)向けに開発
| Project Lead The Wayは、米国で5,000校以上に導入されている、国内有数の科学・技術・工学・数学(STEM)教育ソリューションです。PLTWのコンピュータ統合製造(CIM)カリキュラムには、組立ラインの構築やLynxmotion AL5Dアームの利用が含まれています。本ソフトウェアは、学生がプログラミングに多くの時間を費やすことなくアームを完全に制御し、より大規模な製造・組立システムへ容易に統合できるように開発されました。 |
完全な制御
FlowARM PLTWは、多用途なLynxmotion SSC-32サーボコントローラボードと連携し、AL5Dアームの6つのサーボモーター(手首回転を含む)だけでなく、インターフェースを通じて追加のデジタル入出力も制御可能です:
SSC-32およびSSC-32Uサーボコントローラは、Bluetooth(無線)制御にも容易に対応できます。そのため、ソフトウェアはコンピュータの全COMポートを様々なボーレートで自動的にスキャンし、ケーブル接続またはBluetooth接続のいずれの場合でもコントローラを自動検出・接続します。 |
 |
パターンシーケンサー
FlowArm PLTWには、通常はFlowBotics Studioのフルバージョンにのみ搭載されている強力なパターンシーケンサー機能が備わっており、数日や数週間かかるパターン作成を数分または数時間で実現できます。シーケンサーでは、ルーチンの再生速度も調整可能です。

FlowBotics Studioを使用して開発
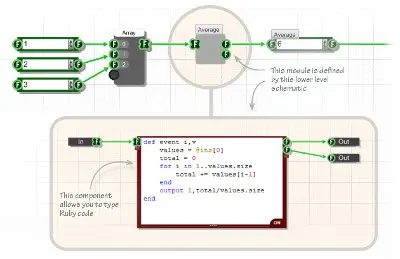
FlowBotics Studioには、PCと多くの標準コンピュータ周辺機器を接続できる数百種類の組み込みコンポーネントが含まれており、新しいハードウェア用のコンポーネントも迅速に作成できます。また、カスタムGUI画面やノブ、ボタン、スイッチなどを用いた新規プロジェクトも簡単に作成でき、FlowBotics Studio内でコンパイルを待つことなく即座に実行可能です。
FlowBotics Studioのプログラミング言語には強力なグラフィックスエンジンが搭載されており、標準ビットマップや独自に描画した図形を用いてカスタムグラフィカルオブジェクトを作成できます。このシステムを利用することで、プロジェクト専用のインターフェースを構築し、写真や図、グラフなどを統合することが可能です。
- 1 x Lynxmotion SES-V1 FlowArm PLTW ロボットアーム ソフトウェア (ダウンロード)
PDFファイル
対応製品
AL5A ロボットアームキット AL5B ロボットアームキット AL5D ロボットアームキット
- Windows XP SP2 (.NET Framework 搭載)、Windows 7、8、10、11 と互換性があります。インターネット接続が必要です。
- Windows XP の最小要件:2GHz (シングルコア)、1GB RAM、解像度 1024 x 768
- Lynxmotion ロボットアームと Lynxmotion SSC-32U USBサーボコントローラ が必要