







概要
- 最大32基までのサーボモーターを制御
- 組み立て済みにてお届け
- USBインタフェース(ケーブル付属)、XBeeソケットおよびTTLシリアル
- クエリコマンドによる双方向通信
- 電圧低下を防止する大容量コンデンサ
- Bluetooth Bee モジュールを含む (モデルは異なる場合があります)
Lynxmotion SSC-32U Bluetoothサーボコントローラ は、非常に人気のSSC-32サーボコントローラボードのBluetoothバージョンです。 USBポート、Bluetooth Bee(付属)と合わせてXBeeソケット(付属)を備え、そして単独バッテリーロボット構築のための改良型電源回路を持っています。
Lynxmotion SSC-32Uサーボコントローラ
Lynxmotion SSC-32Uサーボコントローラは、幾つかの大きな機能を備えた小型、組み立て済みのサーボコントローラです。 高精度の位置決めと極めて滑らかな動きのために高い分解能(1uS)を備えています。 約180°の範囲に対して0.50mSから2.50mSまでの範囲です。 モーションコントロールでは、即時応答、速度制御、時限動作、あるいはそれらの組み合わせが可能です。 ユニークな「グループ移動」により、任意のサーボの組み合わせで、サーボが異なる距離を移動しなければならない場合でさえも、同時にモーションの開始および終了が可能となります。 これは、マルチサーボ歩行ロボットの複雑な歩行方法を作成するための非常に強力な機能です。 サーボの位置や動きは、ホストコンピュータにフィードバックを提供するためにクエリを実行できます。
ビルトインタイプの12サーボヘキサポッドシーケンサもあります。 これにより、わずか2、3の値をホストコントローラから転送するだけで、トリポッドの交互に入れ替わる歩行方法のすべての側面を完全に制御することが可能となります。 どの出力ピンも、TTLレベル出力として使用することができます。 センサの値を読み取るための8つのアナログ入力ピンがあり、それらの内の6ピンは静的またはラッチデジタル入力として使用できるので、短時間のイベントを見逃す心配は無用です。
新しいSSC-32Uボードには、改良型電源と通信管理が備わっています。 ボードにはまだ3つの端子台が付いていますが、新しい電源回路は、ほとんどの場合にVS1の使用のみが必要であることを意味しています。 新しいボードでは、論理回路が電圧低下から保護する大容量コンデンサを持ち、そして論理回路は自動電源選択を持っているので、VL=VS1 のジャンパはもはや必要となりません。 通信に関しては、オンボードUSBを持つことに加え、SSC-32Uは、XBeesやBluetoothなどの無線デバイスを容易に使用するためのXBeeソケットを持っています。

特徴:
- 32チャンネル、1uS分解能のサーボ制御
- クエリコマンドによる双方向通信
- 同期、または「グループ」移動
- ビルトインタイイプの12サーボヘキサポッド歩行方法シーケンサ
- MiniSSC-IIを4つ持つような、MiniSSC-IIのエミュレーション
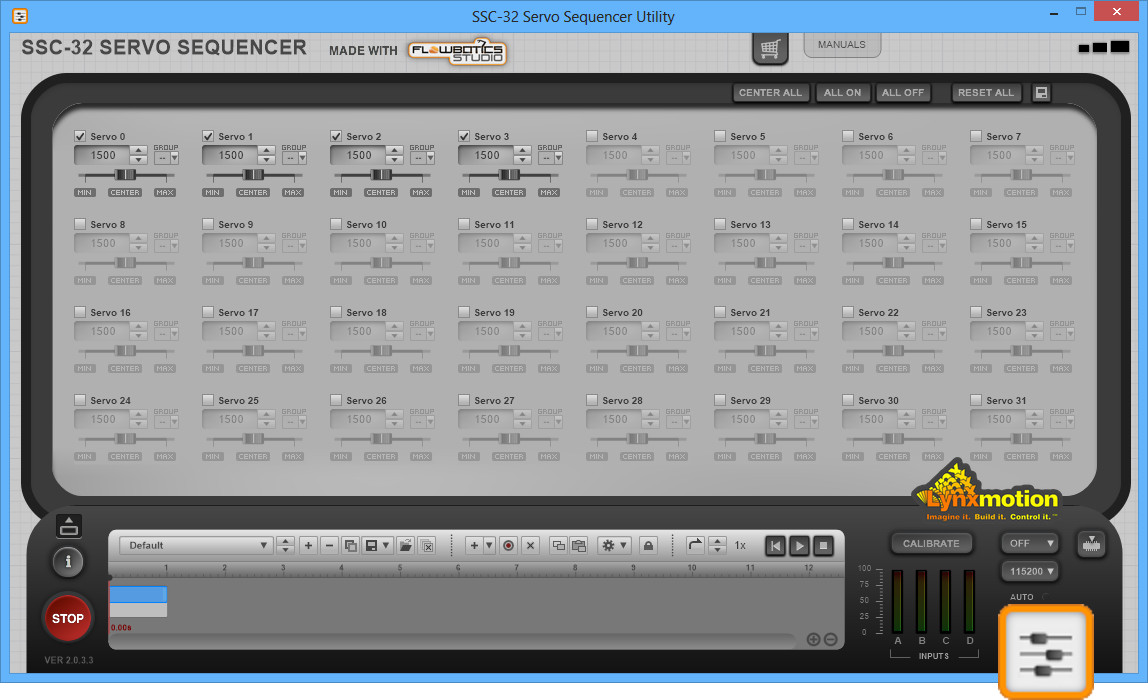
SSC-32サーボ シーケンサ ユーティリティ(FlowBotics Studioを使用して作成)
Lynxmotion SSC-32サーボ コントローラ ボードは、新しい SSC-32サーボ シーケンサ ユーティリティを使って簡単に制御できます。 簡単にロボット工学やアニマトロニクスの実験ができるダウンロード無料のユーティリティとして提供されています。 これは、お役立ちリンクのセクションに記載されています。
このユーティリティは、FlowBotics Studio(ダウンロード)を使用して構築することができるプログラムの種類の一例であり、オープンソースのデモプロジェクトとしてこのプログラムが含まれています。 SSC-32 サーボ シーケンサ ユーティリティ プログラムを使用すると、簡単にサーボモーターを動かし、その位置を修正し、モーションシーケンスを保存および再生し、SSC-32ファームウェアをアップグレードすることができます。
- 1x Lynxmotion SSC-32U Bluetoothサーボコントローラ
PDFファイル
無料のユーティリティ
- SSC-32 Servo Sequencer Utility - Free to Download (FlowBotics Studioを使用して作成)
ウェブサイト
- ファームウェア:2.50USB
- マイクロコントローラ:Atmel ATmega328P
- 外部EEPROM:512 kbit
- 内蔵シーケンサ:12サーボヘキサポッド(交互に入れ替わるトリポッド)
- シリアル入力:USB、3.3V XBee、TTL UART、N81
- ボーレート:プッシュボタンにより9600、38.4K、115.2Kから選択可能。その他の速度はレジスタ設定による。
- RC PWM出力数:32(サーボまたはTTL)
- 入力数:8(8つのアナログ、6つの静的またはラッチデジタル)
- PCインタフェース:USB Mini B(ケーブル付属)
- マイクロコントローラインタフェース:0.1インチヘッダー
- サーボ制御:最大32サーボを直接プラグイン
- サポートされているサーボタイプ:Futaba、Hitec、および一般的な0.1インチ間隔の3ピンのR/C
- サーボ移動範囲:0.5msから2.5ms (ほとんどのRCサーボは180°移動)
- サーボ分解能:1uS (サーボが可能な場合、180°サーボに対して〜0.09°)
- サーボ速度分解能: 1uS /秒
- サーボモーションコントロール:即時、時限、速度または同期
- PCボードサイズ:3.0インチ×2.3インチ(取り付け穴は、各エッジから0.15インチに設定)
- 論理回路電源:VS1とVLの間で自動選択
- VSピーク電流:サイド毎に最大15A
- VS定常電流:サイド毎に最大3〜5A推奨