
概要
- Lynxmotion SSC-32 Servo Sequencer Utility
- SSC-32 Servo Controller用の無償インターフェース
- 最大32個のサーボを簡単に制御可能
- シーケンスの作成・記録・再生が可能
- SSC-32の全機能を探索可能
- SSC-32Uのデフォルトボーレートは115200ではなく9600です
SSC-32 Servo Sequencer Utilityは、Lynxmotion SSC-32サーボコントローラ の制御や、サーボを用いたロボティクスおよびアニマトロニクスの実験を容易に行うことができるユーティリティです。また、標準R/Cサーボモーターを個別に動作させたり、位置のキャリブレーション、動作シーケンスの保存・再生、SSC-32ファームウェアのアップグレードなども可能です。

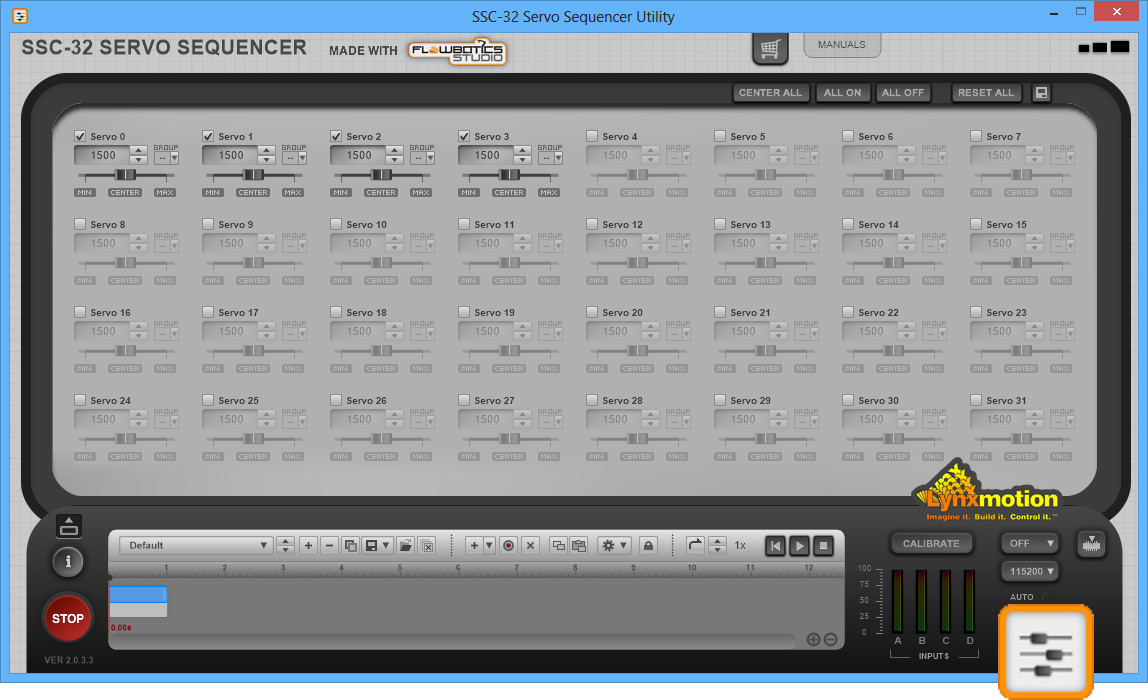
メイン画面には32個のスライダーが表示され、それぞれがサーボ出力に対応しています。ユーザーは各スライダーを左右に動かすことで、各サーボの位置(出力PWM信号は500usから2500usのパルス幅に対応)を調整できます。各スライダーには「Min」と「Max」の位置調整機能があり、サーボの物理的制限に合わせてPWM出力範囲を制限することが可能です。角度(パルス値)を直接入力したり、微調整用の上下矢印を使用したり、全サーボまたは個別サーボを中立位置(1500us)にリセットするショートカットボタンも用意されています。
使用する出力に応じて、各サーボにラベルを付けたり、未使用のサーボを無効化することができます。また、複数のサーボをグループ化し、1つのスライダー操作で同じグループ内の全サーボを同時に動かすことも可能です。複数のグループを作成することもできます。プロジェクトの情報はファイルとして保存でき、将来再利用することができます。

本ユーティリティの強力な機能の一つが、新たに追加されたパターンシーケンサーコンポーネントです。これはFlowBotics Studioに含まれるLynxmotionのデモプロジェクトすべてに搭載されています。パターンシーケンサーを使用することで、スライダーを調整し現在の位置をキーフレームとして記録し、動作のシーケンスを作成できます。キーフレームのサイズや順序を調整・編集することで、ある位置から別の位置への非常に滑らかな動作遷移を実現できます。例えば、Lynxmotion Al5Dロボットアームで物体を持ち上げて別の場所に移動させる(繰り返し動作を含む)シーケンスを簡単に作成できます。
作成したパターンは、他のパターン内のブロックとして追加することができます。これにより、基本的なパターンを作成し、それらを組み合わせてより複雑なシーケンスを構築することが可能です。例えば、ローバー用に「前進」「後退」「左旋回」「右旋回」パターンを作成し、それらを組み合わせて、家具の間を左右に旋回しながら部屋を巡回するような複雑なシーケンスを構築できます。
また、本ユーティリティはSSC-32ボードの下位レベル機能へのアクセスにも優れており、画面上のノブを使った内部キャリブレーション設定の変更や、コマンドラインコンソールを通じた特定の設定レジスタの調整も可能です。
SSC-32 Servo Sequencer Utilityは、
- 1 x SSC-32 サーボ シーケンサ ユーティリティ
- Windows 7, Windows 10