- Mecabot Nano (JP)
- オープンソースの教育研究用ロボット
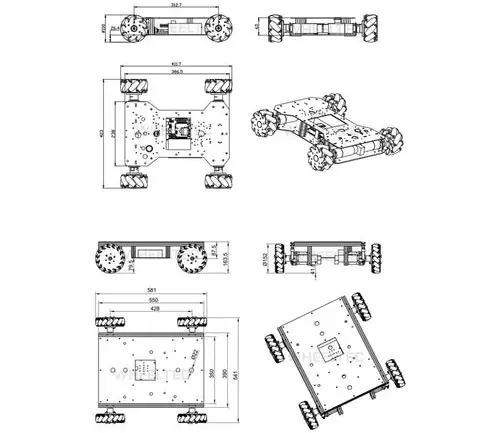
- 全方位メカナムホイールを装着
- ROS用Jetson Nano搭載コンピュータ
- LiDAR および 深度カメラ内蔵
- ROS1 および ROS2との互換性
Mecabot Nano (JP) は、ロボット研究者、教育者、学生、開発者向けのロボットオペレーティングシステム (ROS) に基づく教育 および 研究ロボットです。ROSコントローラ、LiDAR、深度カメラ、STM32モータ / 電源 / IMUコントローラを内蔵し、金属シャーシに全方向メカナムホイールを装着しています。
Mecabot Nanoは、手頃な価格とコンパクトなデザインが特徴で、すぐに使えるパッケージになっていますのでROS初心者にとって理想的なプラットフォームです。また、ロボット教育や研究プロジェクト用の信頼性の高い自律移動ロボット(AMR)プラットフォームでもあります。
なぜROSなのか?
ROSは世界で最も普及しているロボットオペレーティングシステムです。ROSをベースとしたハードウェアプラットフォームを活用することで、世界で最も有望なロボットオペレーティングシステムから幅広い実践的スキルを得ることができます。
クイックスタート
Mecabot Nanoは、ROS および Ubuntuのイメージをあらかじめロードしてあり、ROSに不可欠なソフトウェアパッケージとドライバがすべて含まれています。オンラインチュートリアルでは、数分でMecabot NanoとROSパッケージを起動する方法をご案内しています。
完璧なソリューション
Mecabot Nanoは、ROSの学習や研究に不可欠なハードウェアコンポーネントとROSソフトウェアをまとめた完璧なパッケージです。
拡張可能
Mecabot Nanoは拡張性があり、ロボットアーム、音声認識モジュール、LCD画面、外部キーボードなどのアクセサリを追加することができます。
すぐに教室で使用可能
Mecabot Nanoには、ユーザマニュアル、チュートリアル、サンプルROSコードを含む総合的な教材が付属しているため、教育者はMecabot Nanosハードウェアおよびソフトウェアパッケージを簡単かつ柔軟にカリキュラムに組み込むことができます。
用途:
- 自動運転
- 自律移動ロボット
- SLAM
- ナビゲーション
- モバイル操作
- マルチロボットシステム
- ヒューマン-ロボット インタラクション
- モバイルコンピュータビジョン
- 4G/5G を介したエッジコンピューティング