Mecabot Pro - Nano (JP)
全方向メカナムホイール装着
ROS組込み用 Jetson Nanoコンピュータ
LiDAR および 深度カメラ内蔵
ROS1 および ROS2との互換性
研究開発や短時間での試作に最適
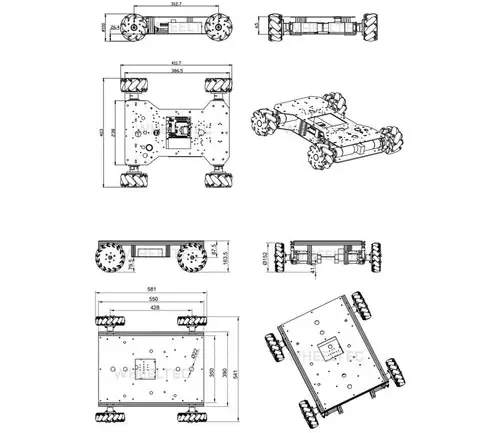
Mecabot Pro - Nano (JP) 自律移動ロボット (AMR) プラットフォームは、ロボット教育、研究開発、短時間での試作などに最適です。ROSコントローラ、LiDAR、深度カメラ、STM32 Motor / Power / IMUを搭載し、金属製シャーシにソリッドゴムホイールを装着しています。
Mecabot Proは、短時間で試作や製品開発を行うことができます。バッテリ寿命は最大4時間、最大負荷で2.5時間です。本製品は、屋内外両方の用途で産業用ロボットやサービスロボットに活用できるプロフェッショナルなAMRプラットフォームです。可搬重量が最大35kgで、最大登坂角度が 30度ですので低コストで大規模な用途に対応できる最も機敏なAMRプラットフォームの1つです。
なぜROSなのか?
ROSは世界で最も普及しているロボットオペレーティング・システムです。ROSをベースとしたハードウェアプラットフォームは、世界で最も有望なロボットオペレーティングシステムによる幅広い実践的スキルを提供することで、ユーザに利益をもたらします。
クイックスタート
Mecabot Proには、ROS および Ubuntuイメージをロード済みで、必要不可欠なROSソフトウェアパッケージとドライバがすべて含まれています。オンラインチュートリアルでは、数分でMecabot Pro と ROSパッケージを起動する方法をご案内しています。
完璧なソリューション
Mecabot Proには、ユーザマニュアル、チュートリアル、サンプルROSコードを含む総合的な技術資料が付属し、貴重な研究開発の時間とリソースを節約できます。
拡張可能
Mecabot Proは拡張性があり、ロボットアーム、音声認識モジュール、LCD画面、外部キーボードなどのアクセサリを追加することができます。
すぐに研究室で使用可能
Mecabot Proには、ユーザマニュアル、チュートリアル、サンプルROSコードを含む総合的な技術資料が付属し、研究者や開発者はMecabot Prosのハードウェアとソフトウェアパッケージをカリキュラムに簡単かつ柔軟に組み込むことができます。
用途
自動運転
自律移動ロボット
SLAM
ナビゲーション
モバイル操作
マルチロボットシステム
ヒューマン-ロボット インタラクション
モバイルコンピュータビジョン
4G/5G を介したエッジ コンピューティング
サービスロボット
検査ロボット
ロボットとドローンの協働
表示を増やす