







概要
- Mecabot Pro - TX (JP)
- 最大積載重量:20kg
- LiDAR および 深度カメラ搭載
- 全方向性メカナムホイール
- ROS1 および ROS2との互換性
- 研究開発や短時間での試作に最適
Mecabot Pro - TX (JP) は、ロボット教育、研究開発、短時間での試作などに最適な自律移動ロボット (AMR) プラットフォームです。 Mecabot Proは、ROSコントローラ、LiDAR、深度カメラ、STM32モータ / 電源 / IMUを搭載し、金属シャーシにソリッドゴムホイールを装備しています。
Mecabot Proは、短時間で試作や製品開発が可能で時間と費用を節約できます。バッテリ寿命は最大4時間、または 最大負荷で 2.5時間です。これは、屋内外の両方の用途向けで、産業用 および サービス ロボットに組み込むことができる本格的なプロフェッショナルAMRプラットフォームです。最大積載量が 35kgで、最大登坂角度は 30度です。 Mecabot Proは、低コストで大規模な作業を実行できる最も機敏なAMRプラットフォームの一つです。
なぜROSなのか?
ROSは世界で最も普及しているロボットオペレーティングシステムです。ROSをベースとしたハードウェアプラットフォームは、世界で最も有望なロボットオペレーティングシステムから広範な実践的スキルを得ることができ、ユーザにとって有益なものとなっています。
クイックスタート
Mecabot Proは、ROSとUbuntuのイメージをインストール済みで、ROSに不可欠なソフトウェアパッケージとドライバをすべて含んでいます。オンラインチュートリアルでは、数分でMecabot ProとROSパッケージを起動する方法をご案内しています。
完全なソリューション
Mecabot Proには、ユーザマニュアル、チュートリアル、サンプルROSコードを含む総合的な技術資料が付属し、貴重な研究開発の時間とリソースを節約できます。
拡張可能
Mecabot Proは拡張性があり、ロボットアーム、音声認識モジュール、LCD画面、外部キーボードなどのアクセサリを追加できます。
研究室ですぐに使用可能
Mecabot Proには、ユーザマニュアル、チュートリアル、サンプルROSコードなどの総合的な技術資料が付属しているので、研究者や開発者は、Rosbot Proのハードウェアとソフトウェアパッケージをカリキュラムに簡単かつ柔軟に組み込むことができます。
用途
- 自動運転
- 自律移動ロボット
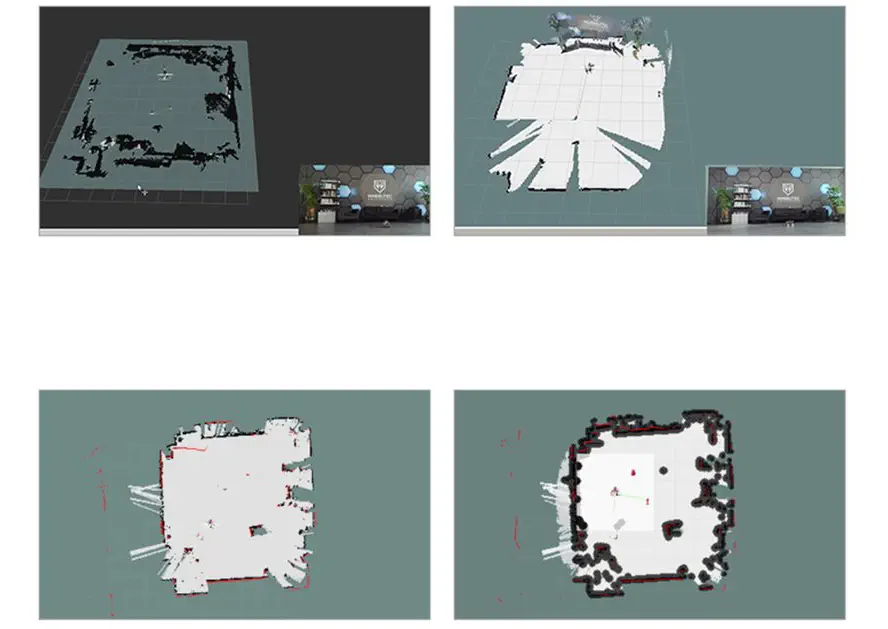
- SLAM
- ナビゲーション
- モバイル操作
- ヒューマン-ロボットインタラクション
- モバイルコンピュータビジョン
- 4G/5G を介したエッジコンピューティング
- サービスロボット
- 検査ロボット
- ロボットとドローンの協働
- 1 x ROS コントローラ:Jetson Nano、Orin Nano、または Orin NXLeishen LSLiDAR
- 1 x Orbbec Astraカメラ
- iOS / Androidアプリ
- 4輪独立サスペンション
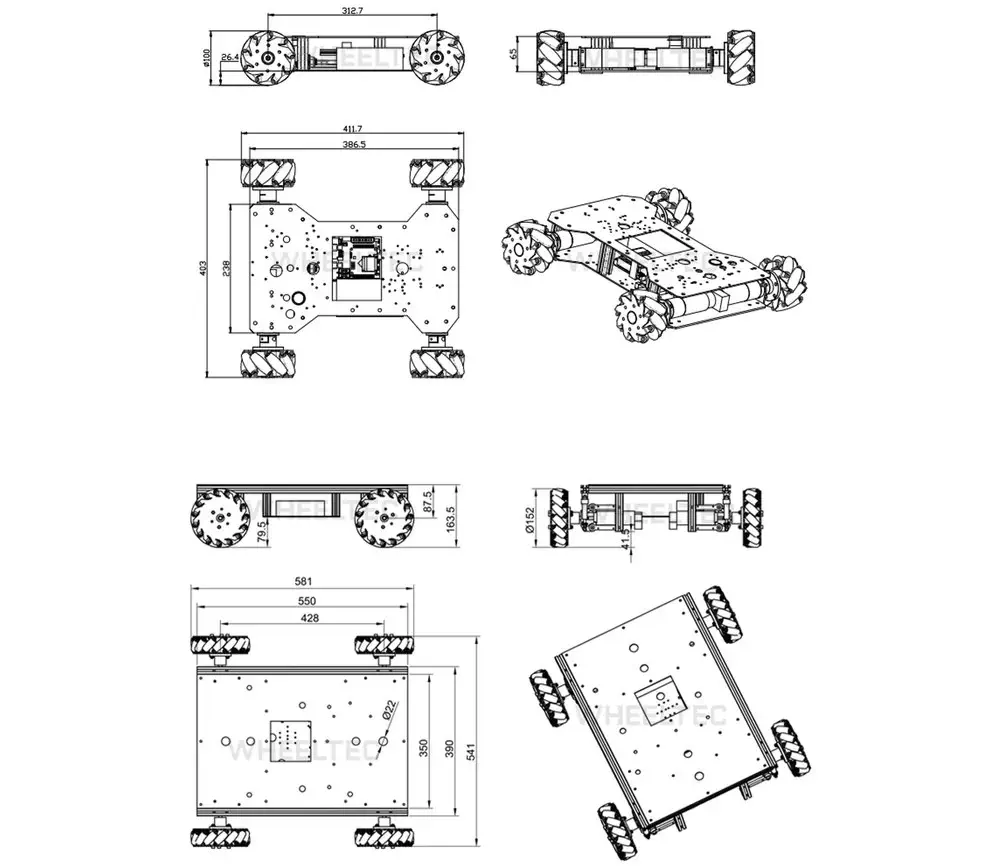
- 581 x 541 x 225.5 mm (長さ x 幅 x 高さ)
- 車輪径:152 mm
PDFファイル
電源
- バッテリ:22.2V 5000mAh
- 充電器:2A DC
- バッテリ寿命:6.5時間 (無負荷時)
- バッテリ寿命:5.5時間(荷重 3kg時)
モータ
- MD36N 35W ブラシ付き DCモータ
- 減速比:1:27
- 最大積載重量:20kg
- 最大速度:1.83m/秒
I/Oインタフェース
- CAN
- シリアルポート
- USB
- HDMI
機械的仕様
- 重量:10.8kg