





支払いとセキュリティ
お客様の決済情報は安全に処理されます。当社はお客様のクレジットカード情報を保存せず、クレジットカード情報にアクセスすることもできません。
概要
- Mecabot X - TX
- 全方向メカナムホイールを装備
- 可搬重量が最大60kgのオールメタルの筐体を採用
- ROSコントローラを内蔵
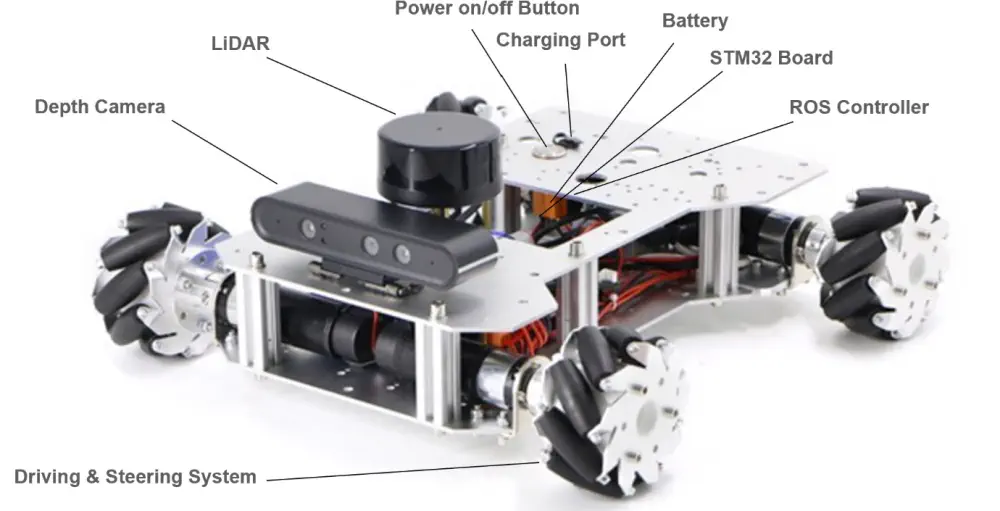
- LiDARと深度カメラを搭載
- 屋内サービスロボットに最適
Mecabot X - TXは、
オールメタルの筐体を採用した屋内サービスロボットに最適な自律移動ロボット(AMR)のプラットフォームです。
Mecabot Xは、ROSコントローラ、LiDAR、深度カメラ、STM32モータ/電源/IMUを内蔵し、4個のメカナムホイールと独立サスペンションシステムを備えた金属シャーシを備えています。
Mecabot Xは、屋内サービスロボット製品の短時間での試作や製品開発のための時間とコストを削減します。金属製の筐体を採用し、ターゲット市場に向けてすぐに出荷できる製品です。特に工場、倉庫、病院、公共交通機関、オフィスビル、ホテル、レストランなどの屋内環境向けのサービスロボットに組み込むための本格的なプロフェッショナルAMRプラットフォームです。
最大1.39m/sの走行が可能で、メカナムホイールにより、Mecabot Xは全方位に移動することが可能です。Mecabot Xは、狭い屋内環境でも柔軟に移動することができ、最大可搬重量は60kgです。Mecabot Plusは、大きな仕事を低コストで遂行できる、最も機敏なAMRプラットフォームです。
なぜ ROS なのか?
ROSは、世界で最も普及しているロボットオペレーティングシステムです。ROSをベースにしたハードウェアプラットフォームは、世界で最も有望なロボットオペレーティングシステムから幅広い実践的なスキルを得ることができ、ユーザにとって有益なものとなります。
クイックスタート
Mecabot Xには、ROSとUbuntuのイメージをあらかじめ搭載しており、必須のROSソフトウェアパッケージとドライバがすべて含まれています。オンラインチュートリアルでは、Mecabot XとそのROSパッケージを数分で起動する方法をご案内しています。
完璧なソリューション
Mecabot X は、ROSの学習や研究プロジェクトに必要なハードウェアコンポーネントとROSソフトウェアをバンドルした完璧なパッケージです。
拡張可能
Mecabot Xは、ロボットアーム、音声認識モジュール、LCD画面、外部キーボードなどのアクセサリを追加できる拡張性を備えています。
クラスルーム対応
Mecabot Xには、ユーザマニュアル、チュートリアル、サンプルROSコードなどの包括的な技術資料が付属しており、研究開発の貴重な時間とリソースを節約することができます。
用途
- 自動運転
- 自律移動ロボット
- SLAM
- ナビゲーション
- モバイル操作
- マルチロボットシステム
- 対話型ロボット
- モバイルビジョンキャプチャ
- 4G/5Gでのエッジコンピューティング
- ロボットとドローンの協働
- サービスロボット
- 運搬・配送ロボット
- 点検・巡回ロボット
- インテリジェントモバイル監視
- 1 x Mecabot X - TX
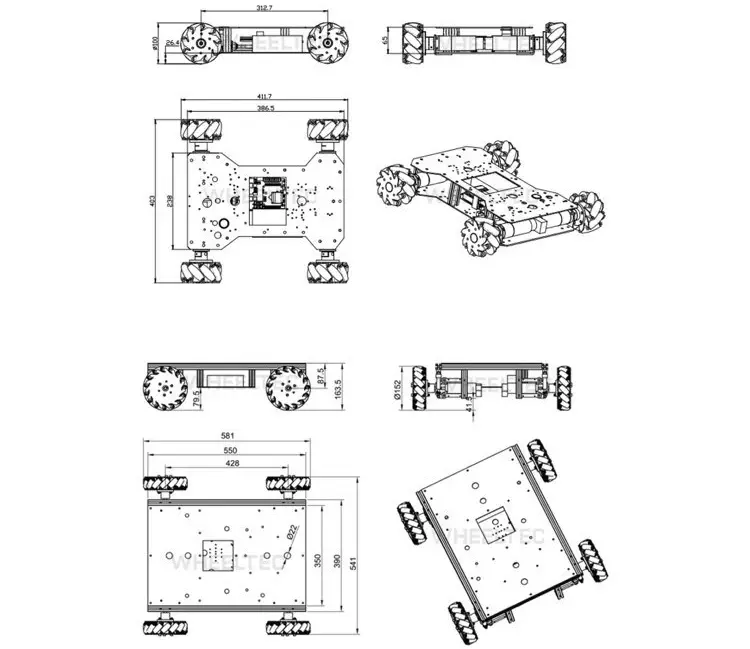
サイズ
- 60×58.1×20.3cm(長さ×幅×高さ)
- ホイール径:152mm
PDFファイル
- 可搬重量:60kg
- サーボ出力:100W
- 最高速度:1.39 m/s
- 電源:
- 22.2V
- 5000mAh バッテリ
- 2A充電器
- 独立サスペンション
- バッテリ寿命:
- 無負荷で 3.5時間
- 3kg積載で2.8時間
- モータおよび減速比:
- MD60 100W DCブラシ付きモータ
- 減速比 1:18
- エンコーダ:500ライン 磁気抵抗効果型 AB相高精度エンコーダ
- I/Oインタフェース:CAN、シリアルポート、USB、HDMI
- リモートコントロール:
- iOS/Android アプリ (標準仕様)
- PS2、模型飛行機用リモコン(オプション、有料)
- 重量:20.5kg