- Mecabot X - Xavier (JP)
- 可動性に優れた全方向性メカナムホイールを装着
- 金属製筐体で最大積載量60kg
- ROSコンピュータ Orin NXを搭載
- LiDAR および 深度カメラ内蔵
- 屋内サービスロボット用途に最適
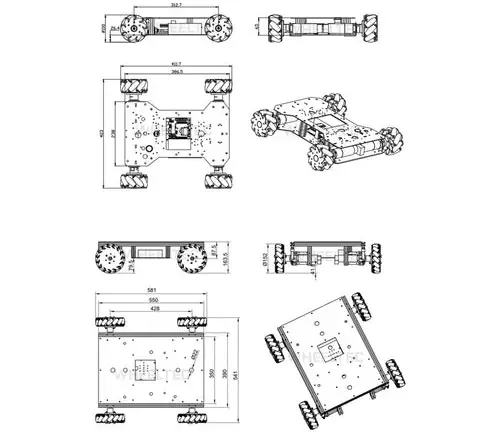
Mecabot X - Xavier (JP) は、屋内サービスロボットに最適な自律移動ロボット(AMR)プラットフォームで、全金属製の筐体を備えています。ROSコントローラ、LiDAR、深度カメラ、STM32モータ / 電源 / IMUを内蔵し、金属製シャーシに4個のメカナムホイールと独立サスペンションシステムを装着しています。
Mecabot Xは、屋内サービスロボットの試作や製品開発を短時間で行うことができ、時間とコストを節約することができます。金属製筐体ですのでターゲットとする市場にすぐに出荷できる製品です。サービスロボット、特に工場、倉庫、病院、公共交通機関、オフィスビル、ホテル、レストランなどの屋内環境向けに設計した本格的なプロフェッショナルAMRプラットフォームです。時速 1.39kmまで走行可能で、メカボXはメカナムホイールにより全方向への運転が可能です。より狭い屋内環境でも柔軟に移動でき、最大可搬重量は60kgです。Mecabot Plusは、低コストで大規模な作業を実行できる最も機敏なAMRプラットフォームの1つです。
なぜROSなのか?
ROSは世界で最も普及しているロボットオペレーティングシステムです。ROSをベースとしたハードウェアプラットフォームを使用することで、世界で最も有望なロボットオペレーティングシステムから幅広い実践的スキルを得ることができ、ユーザに利益をもたらします。
クイックスタート
Mecabot Xには、ROSとUbuntuのイメージをロード済みで、すべての必須ROSソフトウェアパッケージとドライバが含まれています。オンラインチュートリアルでは、数分でMecabot X および ROSパッケージを起動する方法をご案内しています。
完璧なソリューション
Mecabot X は、ROS の学習 および 研究プロジェクトのための完全なパッケージであり、すべての重要なハードウェアコンポーネントとROSソフトウェアがまとめてあります。
拡張可能
Mecabot X は拡張可能で、ユーザはロボットアーム、音声認識モジュール、LCD画面、外部キーボードなどのアクセサリを追加することができます。
すぐに教室で使用可能
Mecabot X には、ユーザマニュアル、チュートリアル、サンプルROSコードなどの総合的な技術資料が付属しており、貴重な研究開発の時間とリソースを節約できます。
用途
- 自動運転
- 自律移動ロボット
- SLAM
- ナビゲーション
- モバイル操作
- マルチロボットシステム
- ヒューマン-ロボット インタラクション
- モバイルビデオ撮影
- 4G/5G を介したエッジ コンピューティング
- ロボットとドローンの協働
- サービスロボット
- 搬送 および 配送ロボット
- 点検 および 巡回ロボット
- インテリジェントモバイル監視