











概要
- すべての部品に適応するロボットグリッパハンド
- 3つの関節式指と4つの把持モードがさまざまなサイズと形状に対応
- イーサネット/ IP、Modbus RTU、DeviceNetまたはEtherCATによる簡単な制御
- 寸法:9インチ立方体
- 重量:2.1 kg
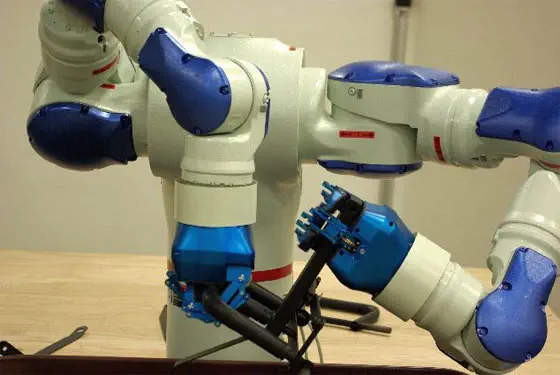
Robotiqアダプティブグリッパーハンドは、産業用ロボットに「人間の手のような」機能を提供する世界初の工業用グリッパーで、さまざまなパーツを操作したり、グリップを検出したり、特定の部分の圧力を制御する能力を向上させます。このグリッパーは、非常に高い部品処理の多様性とジオメトリの複雑さを持つアプリケーションに焦点を当てています。製造、遠隔操作、研究などのさまざまなアプリケーションを対象としています。

使い方
- グリッパは、3つの関節式指と4つの把持モードで構成され、さまざまなサイズと形状のさまざまなオブジェクトを把握します。
- 簡単な開閉コマンドを送信し、グリッパを任意のジオメトリに適応させます。
- 閉じる速度と力を制御します。部分的な開閉が可能です。
- グリッパからグリップ検出フィードバックを受信します。
- 組み込みグリッパコントローラは、Ethernet / IP、Modbus RTU、DeviceNetまたはEtherCATを介した通信を可能にします。教示ペンダントから手をプログラムします。
- この電動グリッパには、ロボットアームまたはロボット用のメカニカルマウントが付属しています。 24V電源と通信用に2つのコネクタがあります。

ターゲットロボットアプリケーション
- 製造:単一のツールを使用して、異なるサイズと形状の部品を選択、保持、配置します。アセンブリ、機械加工、キッティング、部品位置決めなどの用途に使用します。
利点
10,100台の異なる部品を処理する必要がある場合:部品の移送、機械加工、ジグレス溶接。
- セットアップコストと時間を削減するために再調整の代わりに再プログラムが可能
- 手動操作と複雑なツーリングを排除し、多種多様なパーツ用の単一のロボットツール
- 工具交換を不要にしてサイクルタイムを短縮
- カスタムグリッパの設計時間とコストを削減
- 部品や機器の損傷を避けるために、ロボットを移動する前に部品を保持できるかどうかを確認が可能
- 繊細で危険な物体を安全に扱うための圧力を制御が可能
遠隔操作:器用さと直感的な操作を強化します。
利点
それがIEDまたはHAZMATのアプリケーションであったり、危険な環境や人がアクセスしにくい環境であるため、ロボットを使用しているのであれば。これで、 アダプティブグリッパを使用してロボットの機能を強化することができます。
- このロボットハンドは、グリッパを修正したりツールを変更するためにロボットを元に戻したくない場合、オブジェクトの形状に自動的に適応します。
- オペレータが高レベルの開閉コマンドを送信するだけで、グリッパが残りを処理するように、直観的な制御を提供します。
- 4つの把持モード、速度と力の調節が可能な、巧みな使いやすさ。
- 3つの関節式指は、危険な物体を包み込み、安全に保持できます。それはまた、ナイフや小さなシャベルのような人間のツールを保持することができます。

研究:非構造化環境における研究操作のため。
利点
- グリッパは、簡単な高レベルの開閉コマンドを使用して自動的に物体を把握します。研究に集中し、グリッパーに自動的に把握させてください。
- ロボットハンドは、ロボットプログラミングのトリガとして使用する把持状態に関するフィードバックを提供します。
- それぞれ3つの指骨を持つ3本の指、4つの把持タイプ、調整可能な速度と力により、ロボットの操作機能が拡張されます。
- グリッパーは、失敗が許されない工業用でも使用されます。信頼性の高さを保証します。

インテグレーション
適応グリッパは、どの産業用ロボットにも取り付けることができます。
- ほとんどの場合、迅速な統合のために、お客様のアダプティブグリッパをロボットに設定します:指定されたフェイスプレートまたはメカニカルマウント、コネクタおよび通信プロトコルが付属しています。
- ねじを使用してグリッパーをロボットに取り付け、コネクターを差し込みます。
- ティーチペンダントと提供されたコマンドのリストを使用して、グリッパをプログラムします。指定されたパーツに対して、把持タイプ、終了速度、および力を指定します。
- グリッパは、グリップ状態に関する情報をコントローラに返します。
- 部品の配置に高い精度が必要な場合は、グリッパをビジョンまたは手首の力 - トルクセンサと組み合わせて使用することができます。
- Robotiqアダプティブグリッパー
- 電源および通信ケーブル
- 寸法:9x9x9インチ
- 重量:2.1 kg
機械的
- グリッパー開口部:1-155mm
- グリッパー重量:2.3kg
- 把握荷重を含む推奨:10kg
- 推奨摩擦把持荷重:2.5kg
- 最大把持力(フィンガーチップグリップ):15-60N
- 最大ブレークアウト力:100N
- 最大開閉速度(指先グリップ):110mm /秒
- 最小周囲温度:-10℃
- 最大周囲温度:50℃
- 指の位置再現性(指先グリップ):0.05mm
- 指の数:3
- 指あたりの指骨の数:3
- 把持モードの数:4
- IPクラス:31
コントロール
- インターフェイスオプション:Ethernet / IP、Modbus RTU、Modbus TCP / IP、DeviceNet、CANopenまたはEtherCAT
- プログラム可能なパラメータの把握:各指の位置、速度、および力の制御横の指の位置制御
- ステータスLED:電源、通信、エラー
- フィードバック:グリップ検出、モータエンコーダ位置およびモータ電流
電気
- 公称電源電圧:24VDC
- 静止電力(最小消費電力):4.1W
- ピークパワー(最大把持力時):36W
- 最大RMS電源電流(24Vでの電源電圧):1.4A