")
")
")
")




支払いとセキュリティ
お客様の決済情報は安全に処理されます。当社はお客様のクレジットカード情報を保存せず、クレジットカード情報にアクセスすることもできません。
概要
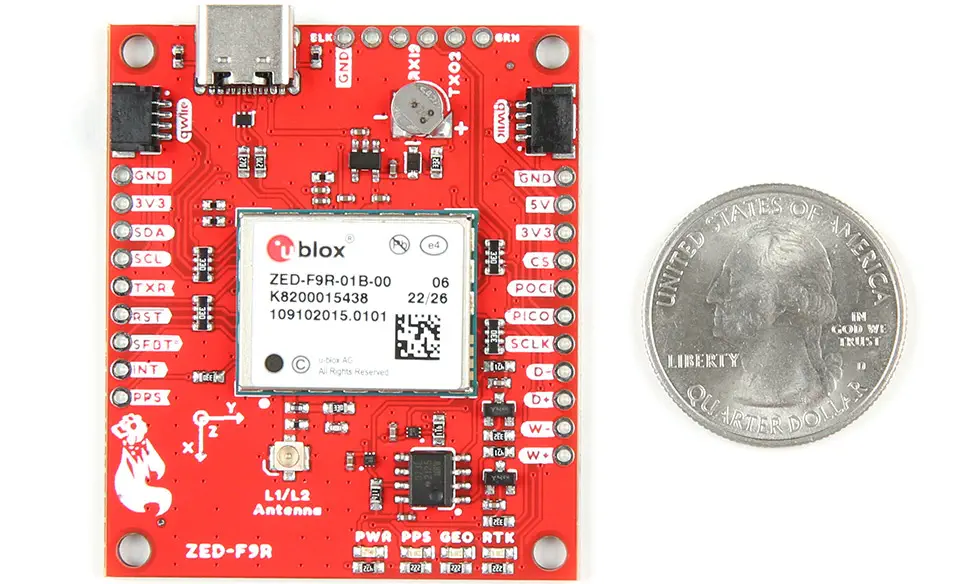
- SparkFun GPS-RTK 推測航法ブレイクアウト - ZED-F9R (Qwiic)
- センサフュージョンテクノロジーによる高精度GPS
- 4台のGNSSシステムからの信号を受信可能
- 厳しい条件下での自律ロボットに最適
- クイックスタートが可能なオンボード充電式バッテリを搭載
SparkFun GPS-RTK 推測航法ブレイクアウト - ZED-F9R (Qwiic) は、センサフュージョン テクノロジーを利用した高精度GPS ボードです。u-bloxの自動車推測航法 (ADR) テクノロジーを活用して、高精度で継続的な位置を提供します。これは、3D IMUセンサ、ホイールティック、車両ダイナミクスモデル、補正データ、GNSS測定を統合することによって実現しました。
ZED-F9Rモジュールは184チャンネルのGNSS受信機で、GPS、GLONASS、Galileo、BeiDouの各配置からの信号を受信できます。このモジュールは、約0.2mの精度を提供するように設計されています。4台のGNSSシステムからの信号の同時受信が可能です。ZED-F9Rは、GNSSと3Dセンサの計測を統合することで、最大30Hzの正確なリアルタイム測位を実現しています。
ZED-F9Rモジュールは、密集した都市部や屋根のある場所で特に威力を発揮し、位置精度を最大限に高めることができます。ZED-F9Rは、信号状態が悪い場所や信号が完全に途絶えた場所でも、継続的な測位が可能です。このため、厳しい条件下で正確な測位を必要とする自律型ロボットアプリケーションに最適な機器です。
ZED-F9RモジュールはI2C(ディスプレイデータチャンネルとして知られる)にも対応しており、Qwiicシステムと互換性があります。これにより、貴重なUARTポートを使用する必要がなくなります。Qwiicシステムでは、はんだ付けが不要で簡単に接続できますが、ブレッドボードを使いたい人のために 2.54mm間隔の端子も用意されています。
SparkFun ZED-F9R GPSブレイクアウトは、ZED-F9RのRTCに電力を供給するオンボード充電式バッテリを搭載しています。これにより、コールドスタートからホットスタートまでの初回修正までの時間を大幅に短縮することができます。このバッテリにより、電源に接続しなくてもRTCとGNSS軌道データを長時間維持することができます。
この製品にはアンテナが必要ですのでご注意ください。 SparkFun Qwiicコネクトシステムは、試作を迅速化し、エラーを発生しにくくするために設計したI2C センサ、アクチュエータ、シールド、ケーブルのエコシステムです。すべての Qwii 対応ボードは共通の 1mmピッチ、4ピン JSTコネクタを使用するため、必要なPCBスペースを削減し、正しい極性接続を保証します。
- 1 x SparkFun GPS-RTK 推測航法ブレイクアウト - ZED-F9R (Qwiic)
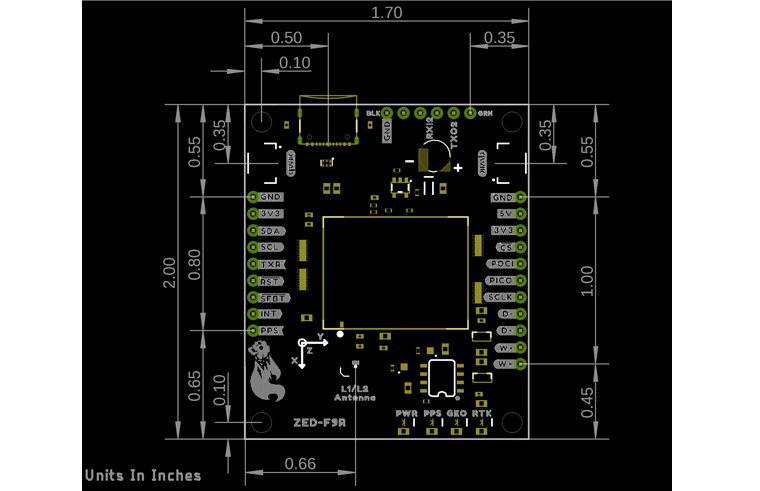
- 43.18 x 50.8 mm
- 2 x Qwiic コネクタ
- 内蔵u.FLコネクタで任意のアンテナを使用可能
- GPS、GLONASS、Galileo、BeiDouを同時受信可能
- 184チャンネル GNSS受信機
- L1C/A 帯域とL2C帯域の両方を受信可能
- 水平位置精度:0.01m (RTK あり)
- 最大ナビゲーションレート:最大30Hz
- 初期修正時間:コールド - 26s、ホット - 2s
- 動作制限:最大G - 4G以下、最大高度 - 80km、最高速度 - 500m/s
- 速度精度:0.05m/s
- 方位精度:0.2度
- 内蔵加速度計とジャイロスコープ
- 時間パルス精度:30ns
- 電圧:5V または 3.3V、ただしロジックはすべて3.3V
- 電流:約85~約130mA (コンスタレーション および 追跡状態によって異なります)
- ソフトウェアで構成可能なジオフェンシング
- 走行距離計のなりすまし検出
- 外部割り込み端子の制御
- 低電力モード
- その他!
- UART または I2Cインタフェース経由で NMEA、UBX、および RTCMプロトコルに対応