







概要
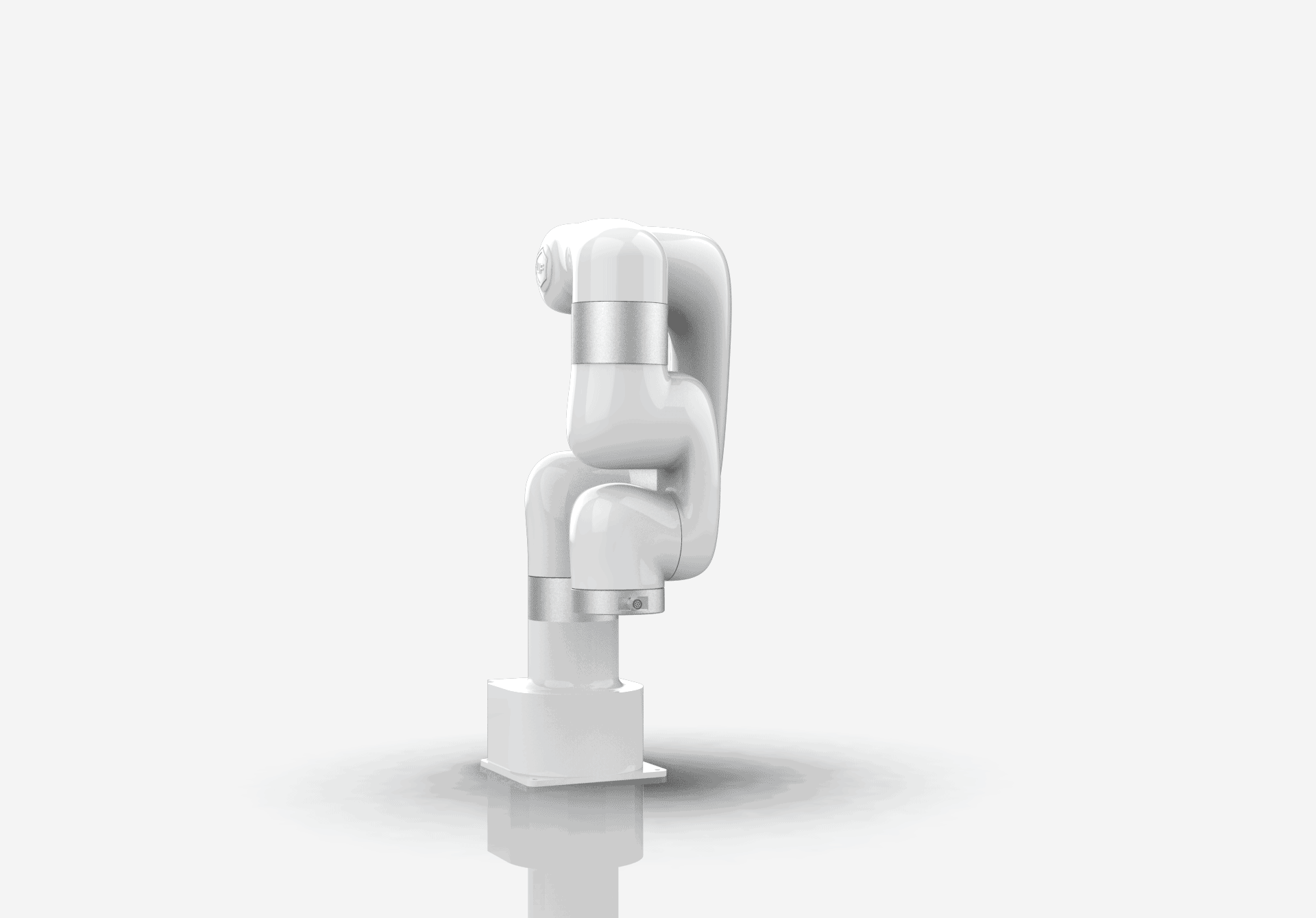
- UFACTORY Lite 6 6-DoF ロボットアーム (440mm) wo/ grippers
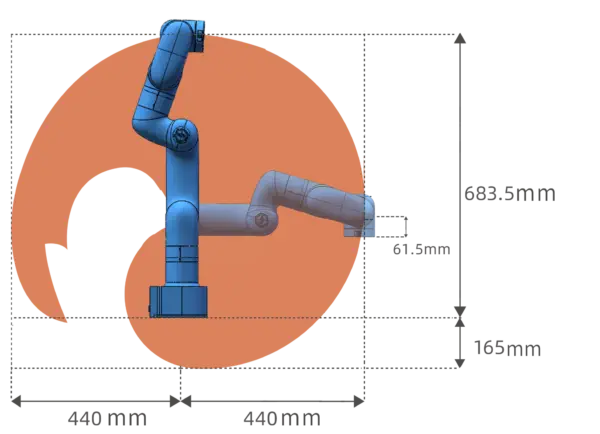
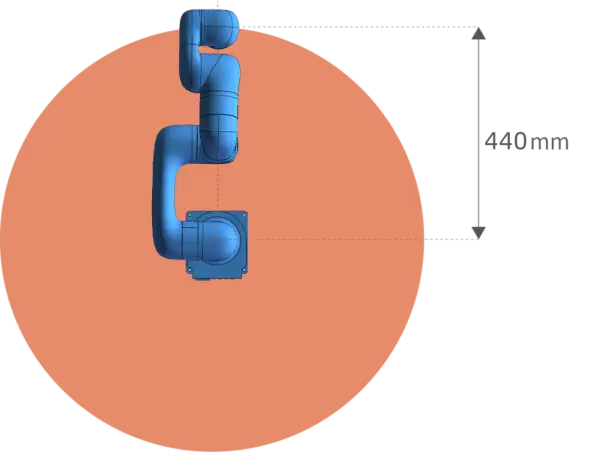
- 可搬重量 0.6 kg、リーチ 440 mm
- 繰返し精度 ±0.5 mm、最高速度 500mm/s
- 6-DoF設計、アルミニウムおよびカーボンファイバー製
- UFACTORY Studio、Python、C++、ROSに対応
- 非常停止ボタンおよびセーフガードストップを搭載
UFACTORY Lite 6 6-DoF ロボットアーム (440mm) wo/ grippersは、教育、研究、軽量自動化用途向けのコンパクトでデスクトップ設置に適したロボットアームです。6-DoFアーキテクチャと440 mmのリーチにより、精密かつ繰返し作業や迅速なプロトタイピングに最適です。本モデルはグリッパー非搭載で出荷されるため、用途に応じてUFACTORYエコシステムからお好みのエンドエフェクタ(二指型、パラレル型、またはバキューム型)を追加できます。
可搬重量
600 g
速度
500 mm/s
リーチ
440 mm
繰返し精度
0.5 mm
600 gの可搬重量と±0.5 mmの繰返し精度を実現し、Lite 6はダイレクトドライブモーターとハーモニックドライブを組み合わせることで、耐久性とコストのバランスを両立しています。6軸卓上型アームとして、超高精度を必要としないが、信頼性の高い動作と繰返し精度が求められる省スペース環境に最適です。
グラフィカルプログラミング
ハンドティーチング
衝突検知
自己衝突防止
安全境界
軌道記録
オフラインタスク
Python
ROS/ROS2
3Dシミュレーション
概要
耐久性の高い協働ロボット
ビジネスを加速
耐久性の高い協働ロボット
ビジネスを加速
- コストパフォーマンスに優れ、厳しい予算にも対応
- 産業用グレードのアクチュエータを採用し、24時間365日稼働に対応
- 制御ボックス内蔵で大幅な省スペース化を実現

安全機能を備えた
柔軟な導入
柔軟な導入
- ハンドティーチング、軽量、省スペース設計で、レイアウト変更なしで複数用途に再配置可能。繰返し作業に最適。
- 全ての協働ロボットに衝突検知機能を搭載。安全性を最優先しています。
初心者にもやさしい
グラフィカルインターフェース
グラフィカルインターフェース
- macOSおよびWindowsなど、さまざまなOSに対応
- 主要なブラウザに対応したWebベース技術
- ドラッグ&ドロップで数分でコード作成可能
強力かつオープンソース
SDKを提供
SDKを提供
- フル機能のオープンソースPython/C++ SDKにより柔軟なプログラミングが可能
- ROS/ROS2パッケージもすぐに利用可能
- サンプルコードによりスムーズな導入をサポート

公式アクセサリとの
シームレスな統合
ロボットアームは公式アクセサリと互換性があり、協働ロボットとシームレスに統合できます。
- Gripper Lite
- Vacuum Gripper Lite

下記の表は、UFACTORYが提供する各種ロボットアームの主な仕様(可搬重量、リーチ、自由度、繰返し精度、最大速度、重量など)を比較したものです。コンパクトなLiteシリーズとxArmシリーズ、リーチの長いUFACTORY 850の違いを一目で確認でき、用途や性能要件に最適なモデルを選択できます。
| Lite 6 | xArm 5 | xArm 6 | xArm 7 | UFactory 850 | |
|---|---|---|---|---|---|
| 仕様 | |||||
| 可搬重量 | 600 g | 3 kg | 5 kg | 3.5 kg | 5 kg |
| リーチ | 440 mm | 700 mm | 700 mm | 700 mm | 850 mm |
| 自由度 | 6 | 5 | 6 | 7 | 6 |
| 繰返し精度 | ±0.5 mm | ±0.1 mm | ±0.1 mm | ±0.1 mm | ±0.02 mm |
| 最大速度 | 500 mm/s | 1 m/s | 1 m/s | 1 m/s | 1 m/s |
| 重量 | 7.2 kg | 11.2 kg | 12.2 kg | 13.7 kg | 20 kg |
| アクセサリ互換性 | |||||
| xArm Gripper | ─ | ✓ | ✓ | ✓ | ✓ |
| xArm Bio Gripper | ─ | ✓ | ✓ | ✓ | ✓ |
| xArm Force Sensor | ─ | ✓ | ✓ | ✓ | ✓ |
| xArm Direct Drive Linear Motor | ─ | ✓ | ✓ | ✓ | ─ |
| DCコントロールボックス | ─ | ✓ | ✓ | ✓ | ✓ |
| xArm Vacuum Gripper | ─ | ✓ | ✓ | ✓ | ✓ |
| Gripper Lite | ✓ | ─ | ─ | ─ | ─ |
| Vaccum Gripper Lite | ✓ | ─ | ─ | ─ | ─ |
- 1x Lite 6 ロボットアーム
- 1x 電源アダプター
- 1x イーサネットケーブル
- 1x 非常停止ボタン
- 1x ユーザーマニュアル
- 1x 取付工具
- アームリーチ: 440 mm
- ベース直径: 130×140 mm
- 重量(ロボットアーム本体): 8 kg
- 可搬重量: 0.6 kg
- 梱包重量: 12 kg
機械仕様
- 自由度: 6軸
- 可搬重量: 600 g
- リーチ: 440 mm
- 繰返し精度: ±0.5 mm
- 各軸速度: 180°/s
- 動作温度範囲: 0-50℃
- 保護等級: IP40
- 材質: アルミニウム、カーボンファイバー
電気仕様
- 入力電圧: 24V DC
- 消費電力: 標準150W、推奨350W
- モーター: ダイレクトドライブモーターとハーモニックドライブの組合せ
- 最大電流: 14.66A
通信
- インターフェース: Ethernet、RS485 Master*1、RS485 Slaver*1
- 対応プロトコル: Modbus TCP(Ethernet経由)、RS-485
- ソフトウェア対応: Windows 10、macOS 10.10以降、Ubuntu 12.04以降
- クラウド/リモートアクセス: 有(UFACTORY StudioによるWebベースリモートアクセス)
安全性・認証
- 安全機能: 衝突検知、安全停止/エラー報告
- 認証: CE、RoHS
| Lite 6 | |
|---|---|
| 自由度 | 6 |
| リーチ | 440 mm |
| 可搬重量 | 600 g |
| 繰返し精度 | 0.5 mm |
| 速度 | 500 mm/s |
| EOAT | ISO9409-1-50 |
| モータータイプ | DCブラシレス |
| コントロールボックス | 内蔵 |
| I/Oポート(ベース) | 8 |
| I/Oポート(EOAT) | 4 |
| ロボット通信 | Modbus TCP |
| 開発環境 | Python/ROS/C++ |
| GUI | UFACTORY Studio |
| 最大速度 | 180°/s |
| ジョイント1 | ±360° |
| ジョイント2 | ±150° |
| ジョイント3 | -3.5°~300° |
| ジョイント4 | ±360° |
| ジョイント5 | ±124° |
| ジョイント6 | ±360° |