















概要
- Leo Rover v1.8 (組立て済み)
- 4WD 屋外ロボットキット
- オープンソースでRaspberry Pi上に構築できます。
- 高信頼性 防水性 拡張可能
- ペイロード容量: 約5kg
- すぐに使えるビデオストリーミングとUIの駆動。
Leo Rover v1.8 (組立て済み) は、4WD 屋外ロボットキットで、高信頼性 防水性 拡張可能が特長のローバーキットです。
73.2:1 遊星ギアボックスと12 CPRエンコーダを備えた 4個のハブ内DC モータを使用し、直径 130mmホイール 4個とフォームインサート (非空気圧) ゴム製タイヤで駆動します。
")
公称運転時間は約4時間 走行可能推定最大障害物サイズは 70mmです。ライブビデオストリーミング中に、100mの距離まで Leo Roverに接続できます。解像度は 5Mピクセル 視野角は 160° 魚眼レンズを使用しています。
")
デフォルトで動画ストリーミングと UIをリモコン制御できます。ローバー自体に自律性はありませんが、自律性機能を追加できます。ソフトウェアは、Ubuntu 20.04と、自律性 および 半自律性機能の実装が簡単にできるRobot Operating System (ROS) に基づいています。
LIDAR または ステレオビジョンカメラを追加してローバーのセルフナビゲーション機能を強化し、その上に他機能を構築できるのが特長です。フロントカメラ 1個とホイールエンコーダ 4個を搭載していますので、動画ストリーミングと基本的な走行距離計測をすぐに実行できます。
")
注: 常時設計の改善に取り組んでいますので、届いたローバーの外観と動きがデモ画像 / 動画で見られるものと若干異なる場合があります。
- 1 x Leo Rover v1.8 (組立て済み)
- 1 x バッテリ充電器
- 1 x 六角ドライバ (追加モジュール取り付け / 取り外し用)
- サポート トラブルシューティング 統合用 公式コミュニティ Slack pivateチャンネル
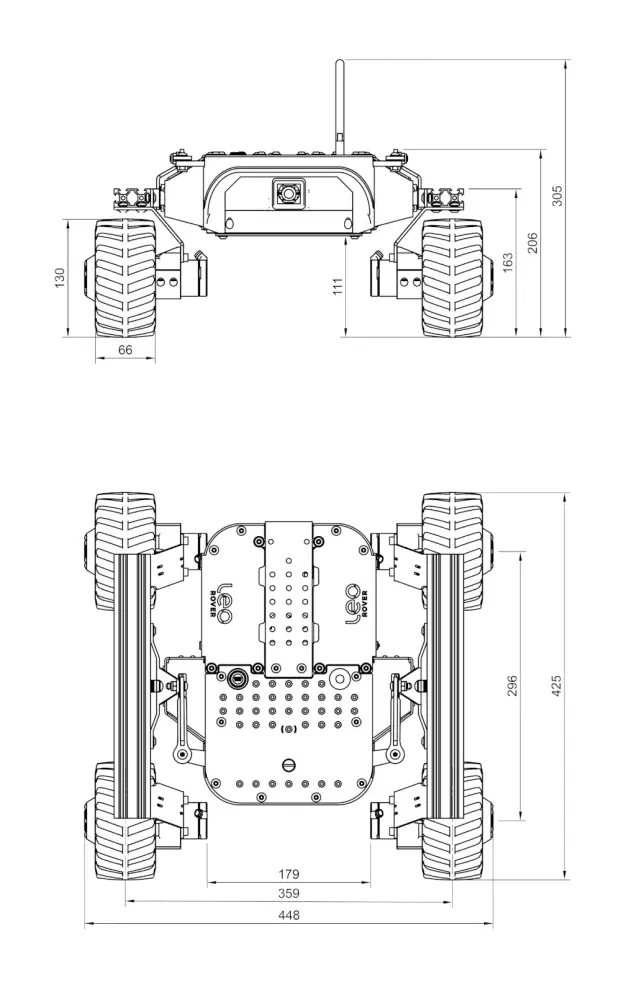
サイズ
- 重量: 6.5 kg
- サイズ: 448 x 425 x 305 mm
- ペイロード容量: 約 5 kg
上部プラットフォームの取り付けサイズ
- サイズ: 299 x 183 mm
- ホールグリッド: 18 x 15 mm
- 穴: 40 x Φ7 + 22 x Φ5.5 mm
性能
- 推定最大障害物サイズ: 70mm
- IP規格: IP55 に準拠 (非認定)
- 実行時間: 推定公称運転時間 4時間
- 接続範囲: 最大100m (ライブ動画ストリーミング)
ホイール
- モータ: 4 x 73.2:1 遊星ギアボックス および 12 CPRエンコーダ搭載 ハブ内 DCモータ
- ホイール径: 130mm
- タイヤ素材: フォームインサートゴム (非空気圧)
バッテリ
- 電圧: 11.1V DC
- 容量: 5000mAh
- タイプ: リチウムイオン 内部PCM短絡 過電流 過排水安全機能装備
- 最大電流: 8A (ローバー全体合計)
カメラ
- 解像度: 5Mピクセル
- レンズ: 視野角160° 魚眼レンズ (赤外線フィルタなし 暗視可能)
通信
- 外部アンテナ付き WiFi 2.4GHz アクセスポイント
- 接続用内部RPiアンテナでWiFi 2.4GHz + 5GHz
ソフトウェア
- OS: Ubuntu 20.04 + ROS Noetic ベースの LeoOS。ROS2 をサポート
- UI: 「10.0.0.1」ですぐに使用可能 (標準 Leo ソフトウェアイメージを使用する場合)
- オープンソースファームウェア
電気的特性
- Raspberry Pi 4B 2GB (または それ以上) をメインコンピュータとして使用
- LeoCore: STM32F4 (@84MHz 64KB RAM 256KBフラッシュ) (リアルタイムマイクロコントローラとして)
スピード特性
- 最大線上走行速度: 約0.4m/秒
- 最大角上走行速度: 約60°/秒
接続インタフェース - 外部から利用可能
- 1 x 防水 microUSBソケット
- 1 x アンテナ RP-SMA オスソケット
- 1 x 3ピン Weipu SP13 12V 電源ソケット
接続インタフェース - 内部オープンインタフェース
- RaspberryPi:
- 2 x USB
- 20 x GPIO
- RJ45イーサネット
- 1 x RPi ディスプレイポート
- BLE付き Bluetooth 5.0
コントローラ
- ブラウザの「10.0.0.1」のもとでストックUIにアクセスするには、Web対応デバイスが必要です。
- デバイス要件: Windows / Linux / Android / macOS
- 開発を容易にするために、デバイスでROSを使用することを強くお勧めします。