



Description
- Six-axis robotic arm with an open control interface
- 2.2 meter reach diameter and ability to lift 4.5kg (10 pounds)
- Closed-loop position control at all 6 joints
- CNC machined aluminum and carbon fiber construction
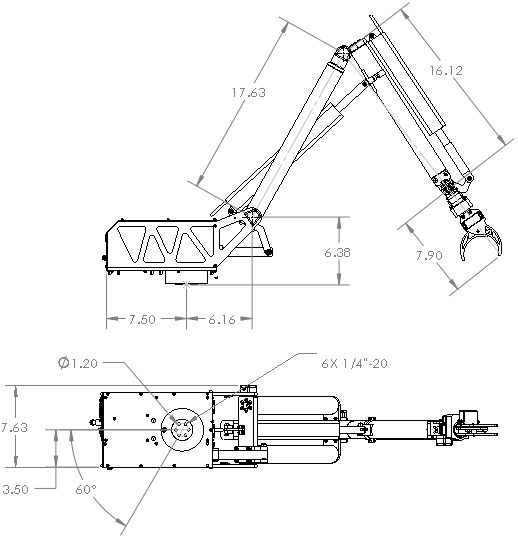
The Advanced Robotic Manipulator (ARM 3.0) - Closed Loop is a six-axis robotic arm with an open control interface to allow simple implementation into other projects. Each joint is commanded to position via RC PWM signals. Carbon fiber segments and CNC machined aircraft grade aluminum make the ARM 3.0 a robust unit. With a reach diameter of over 2 meters and ability to lift 4.5kg (10 pounds) it is a very capable ARM value.

This 6 degree of freedom arm uses linear actuators and rotary servos to provide an operation envelope of over 7 ft in diameter. Sealed ball bearings provide precision movement at each joint. The lower 4 joints use absolute encoders for precise, linear control. Typical current draw at full capacity is approximately 7 amps. Rotation speed of base joint is 60 degrees / second. Wrist rotates 240 degrees in 2.3 seconds. Gripper moves from fully open to fully closed in less than 1 second. Reverse power protection and over-current protection is built into to the unit. A power switch with green LED "on" state indication is located on the electronics enclosure.
Closed-Loop Position Control
All joints operate in a closed loop position control mode. All joints are PWM ready if you choose to command from your microcontroller or from an RC radio. All joints utilize absolute feedback. This version of the ARM is best suited for applications where the ARM will be under computer control and where the computer will send a PWM command to the each joint of the ARM to go to a specific position. The ARM will then hold that position.

Improvements Over Arm 2.0
The ARM 3.0 leverages the success of the ARM 1.0 and 2.0 projects. It supersedes ARM 2.0 and provides improved performance. Better reliability and more lifting capacity are notable improvements as well as better optimized ranges of travel for each joint. Absolute encoder feedback at the joints improves control and position feedback resolution and linearity.
Features
- Holds position on lower 4 joints with power off
- Absolute, linear feedback from each joint
- Rugged aluminum enclosure houses control electronics
- DB-25 connector for power and signal input
- On/Off power switch at base
- Carbon fiber segments
- Compatible with conventional radio control units
- Power indicator LED
- Reverse connection protected
Applications
- Robotic controls research projects
- University engineering labs
- Manipulator for un-manned ground vehicles
- Robotic competitions
- Testing of products in hazardous environments
PDF File
- Reach envelope: 86.6-inch (2.2m) diameter
- Lift capacity: 10 lbs (4.5 kg) at full extension
- Interface: RC PWM
- Input: 12V DC, 7.5A (peak)
- Weight: 20.4 lbs (9.2 kg)