- Mecabot X - Xavier (JP)
- Omnidirectional mecanum wheels for mobility
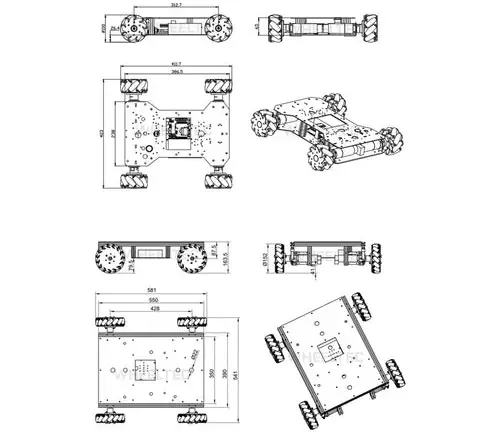
- Metallic enclosure with a maximum payload of 60kg
- Equipped with a ROS Computer Orin NX
- Includes a built-in LiDAR and Depth Camera
- Suitable for indoor service robot applications
The Mecabot X - Xavier (JP) is an ideal Autonomous Mobile Robot (AMR) platform for indoor service robot applications, with a full metallic enclosure. It is equipped with a built-in ROS Controller, LiDAR, Depth Camera, STM32 Motor/Power/IMU, and a metal chassis with four Mecanum Wheels and an Independent Suspension System.
Mecabot X can save time and money for rapid prototyping or product development for indoor service robot projects. With its metallic enclosure, it is a ready-to-ship product for your target market. It is a serious professional AMR platform designed to be integrated into service robots, especially for indoor environments such as factories, warehouses, hospitals, public transport, office buildings, hotels, and restaurants. It can travel up to 1.39 km/h, and its mecanum wheels allow the Mecabot X to maneuver in omnidirectional directions. It can navigate in smaller indoor environments with greater flexibility and has a maximum payload of 60 kg. Mecabot Plus is one of the most agile AMR platforms that can carry out large jobs at a low cost.
Why ROS?
ROS is the most popular robot operating system in the world. Using a hardware platform based on ROS will benefit the user by gaining extensive practical skills from the world's most promising robot operating system.
Quick Start
ROS and Ubuntu images are preloaded on Mecabot X, which includes all essential ROS software packages and drivers. Our online tutorial will guide users on how to launch Mecabot X and its ROS packages within minutes.
Complete Solution
Mecabot X is a complete package for ROS learning and research projects, bundled with all essential hardware components and ROS software.
Expandable
Mecabot X is expandable, allowing users to add accessories such as robotic arms, voice recognition modules, LCD screens, external keyboards, etc.
Classroom Ready
Mecabot X comes with comprehensive technical materials, including a user manual, tutorials, and sample ROS codes, saving valuable research and development time and resources.
Applications
- Autonomous driving
- Autonomous mobile robot
- SLAM
- Navigation
- Mobile manipulation
- Multi-robot system
- Human-robot interaction
- Mobile vision capture
- Edge computing over 4G/5G
- Robot and drone collaboration
- Service robot
- Transport and delivery robot
- Inspection and patrol robot
- Intelligent mobile surveillance