Compact and efficient, controlling one DC motor via an I²C interface
Compatible with motor supply voltages from 4.5 V to 48 V
Capable of delivering continuous output currents up to 2 A
Comes with a comprehensive user's guide and Arduino and Python libraries
The Motoron M1T256 I²C Single Motor Controller is a compact device designed to control one DC motor via an I²C interface. It is possible to connect multiple Motoron controllers to the same I²C bus, which simplifies the expansion of a system with additional motors. The M1T256 model is compatible with motor supply voltages ranging from 4.5 V to 48 V and is capable of delivering continuous output currents up to 2 A. This model comes with header pins included, however, they are not pre-soldered.
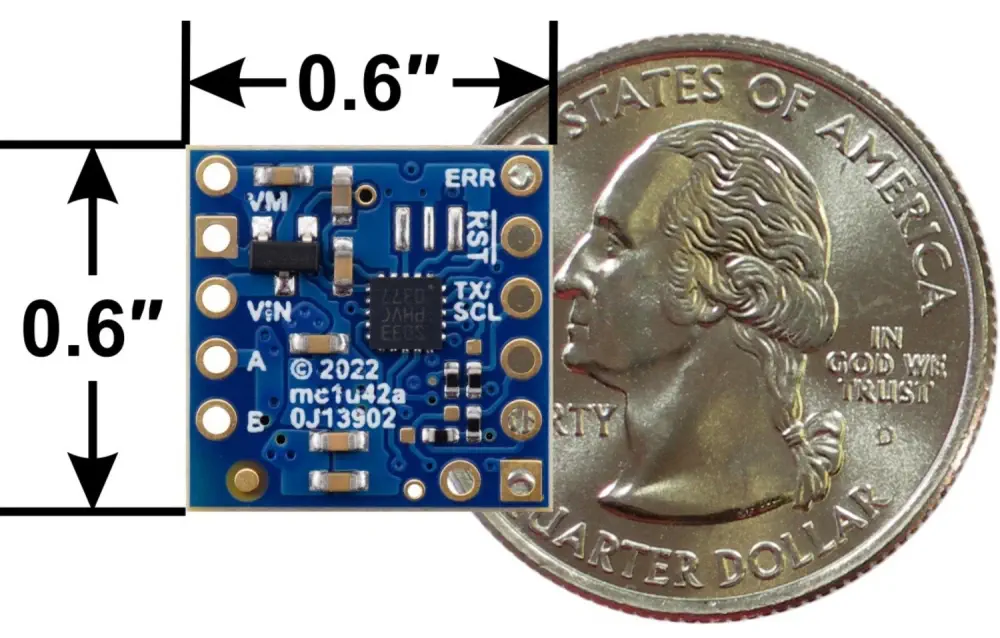
The Motoron M1T256 and M1U256 controllers are designed to facilitate the control of a single bidirectional, brushed DC motor using an I²C or TTL serial (UART) interface, respectively. These compact boards, measuring 0.6 x 0.6 inch, are compatible with motor supply voltages from 4.5 to 48 V and can deliver continuous output currents up to 2 A. It is possible to configure multiple Motoron controllers to operate on a single I²C or serial bus, which allows for independent control of numerous motors. Unlike many motor drivers, the Motoron does not necessitate any PWM outputs or timers on the microcontroller. Instead, a single I²C or UART interface is sufficient, regardless of the number of Motoron controllers connected.
The features and specifications of the Motoron M1T256 include a single motor control channel that enables the control of one bidirectional brushed DC motor per Motoron. It has a wide motor supply voltage range of 4.5 to 48 V (absolute maximum), and a maximum output current per motor of 2 A continuous, peaking at 6.4 A for less than one second. It also offers reverse-voltage protection on the motor power supply (down to -40 V), a logic voltage range of 3.0 V to 5 V, and a control interface of M1T256: I²C (up to 400 kHz).
Please note that the header pins are included but not soldered in. It is also important to remember that the Motoron does not require any PWM outputs or timers on the microcontroller.
M1T256 with an I²C interface
1x 12 breakaway male header (included but not soldered in)