











Description
- Robotic gripper hand that adapts to all parts
- 3 articulated fingers and 4 grasping modes adapt to a variety of sizes and shapes
- Simple control over Ethernet/IP, Modbus RTU, DeviceNet or EtherCAT
- Dimensions: 9 inches cubed
- Weight: 2.1 kg
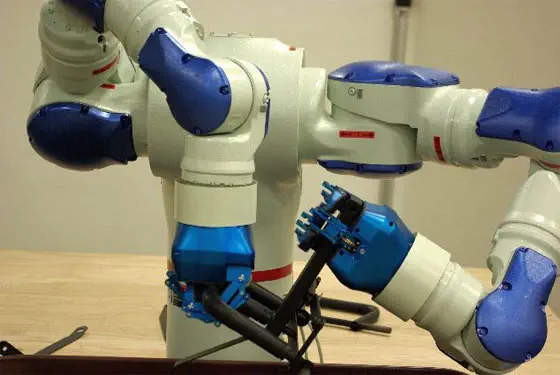
The Robotiq Adaptive Gripper Hand is the world's first industrial dexterous gripper that gives industrial robots "hand-like" capabilities to enhance their ability to manipulate a wider variety of parts, detect a grip, and control pressure on a given part. This Gripper is focused on applications that have a very high parts handling variety and complexity in geometry. It is intended for various applications such as Manufacturing, Teleoperation and Research.

How it works
- The gripper is composed of 3 articulated fingers and 4 grasping modes to pick grasp a wide variety of objects of different sizes and shapes.
- Send simple open-close commands and let the gripper adapt to any geometry.
- Control the closing speed and force. Possible partial closing/opening.
- Receive grip detection feedback from the gripper.
- Embedded gripper controller enables communication over Ethernet/IP, Modbus RTU, DeviceNet or EtherCAT. Program the hand from the teach pendant.
- This Electric gripper, comes with the mechanical mount for your robot arm or robot. Has two connectors on the side for 24V power supply and communication.

Targeted robotics applications
Manufacturing: Work with a single tool to pick, hold and place parts of different sizes and shapes. Use in applications such as assembly, machine tending, kitting or parts positioning.
Benefits
When 10s or 100s of different parts need to be handled: Parts Transfer, Machine Tending, Jig-Less Welding.
- Reprogram instead of retooling to reduce setup cost and time
- A single robot tool for a wide variety of parts, eliminating manual operations and complex tooling
- Eliminates tool changing to reduce cycle time
- Decrease custom gripper design time and cost
- Know if you are able to hold the part before moving the robot to avoid damaging parts or equipment
- Control pressure to handle delicate or dangerous objects safely
Teleoperation: For enhanced dexterity and intuitive control.
Benefits
Whether it's an IED or HAZMAT application, you are using a robot because it's a dangerous environment or one where human access is difficult. Now you can enhance your robot's capabilities with the Adaptive Gripper.
- This Robot Hand adapts automatically to the shape of any object because you don't want to bring the robot back to modify the gripper or change the tool.
- Provides intuitive control so the operator only needs to send high-level open/close commands and the gripper does the rest.
- Enhanced dexterity with four grasping modes, adjustable speed and force.
- Three articulated fingers can wrap around and hold dangerous objects safely. It can also hold human tools like a knife or a small shovel.

Research: For research manipulation in unstructured environments.
Benefits
- The gripper adapts automatically to grasp anything using simple high-level open and close commands. Focus on your research, let the gripper do the grasping.
- Robot Hand provides feedback on grasp state to be used as trigger in the robot programming.
- Three fingers with three phalanxes each, four grasping types, adjustable speed and force expands you robot's manipulation capabilities.
- The gripper is also used in industrial settings where it must not fail. You benefit from the same reliability.

Integration
- The Adaptive Gripper can be installed on any industrial robot.
- In most cases, we configure your Adaptive Gripper to your robot for a quick integration: comes with the specified faceplate or mechanical mount, connector(s) and communication protocol.
- You install the gripper on your robot using screws and plug in the connector(s).
- Using the teach pendant and the provided list of commands, you program the gripper. For a given part, you specify the grasping type, the closing speed and force.
- The gripper returns information about the gripping state back to the controller.
- If higher precision is needed on part placement, the gripper can be used in conjunction with vision or a wrist force-torque sensor.
- Robotiq Adaptive Gripper
- Power and communication cables
- Dimensions: 9x9x9 inches
- Weight: 2.1 kg
ZIP File
PDF file
CAD files
Mechanical
- Gripper opening: 1-155mm
- Gripper weight: 2.3kg
- Recommended encompassing grasp payload: 10kg
- Recommended friction grasp payload: 2.5kg
- Max gripping force (Fingertip Grip): 15-60N
- Max break away force: 100N
- Max. closing speed (Fingertip Grip): 110mm/sec
- Min. ambient temperature: -10°C
- Max. ambient temperature: 50°C
- Finger Position Repeatability (Fingertip Grip): 0.05mm
- Number of fingers: 3
- Number of phalanxes per finger: 3
- Number of grasping modes: 4
- IP class: 31
Control
- Interface options: Ethernet/IP, Modbus RTU, Modbus TCP/IP, DeviceNet, CANopen or EtherCAT
- Grasping programmable parameters: Position, speed and force control of each finger Lateral finger position control
- Status LEDs: Power, communication and error
- Feedback: Grip detection, motor encoder position and motor current
Electrical
- Nominal supply voltage: 24VDC
- Quiescent power (minimum power consumption): 4.1W
- Peak power(at maximum gripping force): 36W
- Maximum RMS supply current (supply voltage at 24V): 1.4A