











Description
- Lynxmotion (LSS) - mechDOG Quadruped Base Kit
- 12DoF quadruped robot for development & experimentation
- Uses configurable & versatile Lynxmotion Smart Servos
- Frame components are made from durable aluminum & G10 composite
- Designed for adding sensors, Raspberry Pi, Arduino & more
- Assembly, programming & additional parts required
The Lynxmotion (LSS) - mechDOG Quadruped Base Kit was a collaboration between Lynxmotion and Mech-Dickel Robotics to create a four-legged (quadruped / quadrapod) robot “dog” with similar degrees of freedom to a mammal. This medium sized platform is intended to provide users with a smart servo based platform for indoor development and experimentation.
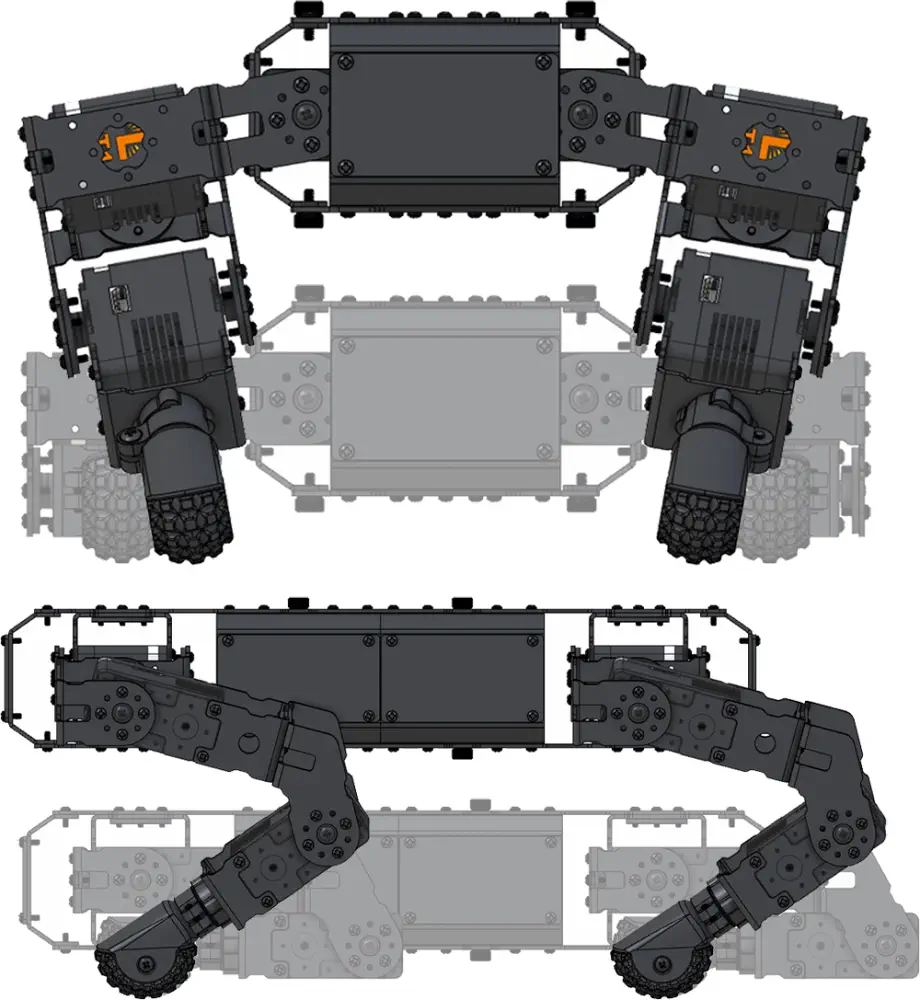
mechDOG in Sleep and Wake positions
Lynxmotion ST1 modular smart servos are used throughout, along with a variety of Lynxmotion Servo Erector Set (SES) V2 brackets. The body plates are made of composite G10 and the body side panels are anodized aluminum. The LSS Adapter acts to split battery power to each leg, and can be used with either an Arduino shield-compatible microcontroller, single board computer (SBC) like the Raspberry Pi or even directly with a USB cable.

Make full use of the LSS / SES V2 Modular Brackets
The internal compartment can be quickly accessed using thumbscrews at the top and bottom. There are mounting points at the top for accessories like RPLidar-A1 360 degree laser scanner. The size of the robot and built-in functionality of the smart servos make it ideally suited as an inexpensive development platform onto which a variety of sensors can be mounted and used for autonomous behaviors, navigation and more.
![]()
mechDOG with its 12 Lynxmotion Smart Servos (LSS)
Incorporating Lynxmotion’s Smart Servo Motors (rather than small 9g RC servos commonly used in small tabletop quadrupeds, or BLDC motors for larger quadrupeds) gives the developer significant control over and feedback from the servos. Possible configurations of each servo include angular range, center position, direction, speed, LED color, operating mode (serial vs. RC) and more. Feedback per servo (in serial mode) includes but is not limited to: absolute angular positioning, voltage, current, speed, temperature, servo status. The servos use a “human readable” communication protocol, making them very easy to use and understand. Arduino, Python and ROS libraries are available for the servos.
The mechDOG Base Kit is intended to allow customers to add their own electronics such as a microcontroller or single board computer. Arduino compatible sample motion code which uses RC input is available which the customer can modify for their needs, though as a quadruped legged development platform, the customer is expected to program the robot to suit their needs and application.
Features
- 3 Degrees of Freedom (DoF) per leg: hip; shoulder; knee
- Fully configurable smart servo motors with multiple feedback parameters
- Modular aluminum brackets & G10 body plates
- Mounting plates for: Parallax Ping ultrasonic sensor; Sharp GP2D IR sensor; SES V2 Brackets; LSS Servo
- Mounting holes for the Lynxmotion BotBoarduino, Arduino UNO, Lynxmotion LSS-2IO and Raspberry Pi
- 12x Lynxmotion SES-V2 Standard Smart Servo (LSS-ST1)
- All necessary wiring & wiring clips
- All necessary SES V2 modular aluminum brackets
- 4x TPU 3D Printed feet
- G10 composite body panels & sensor panels
- Servo calibration jig (used to zero the servos after assembly)
Lynxmotion (LSS) - Adapter Board (USB Type-C)
What's Required:
- Microcontroller:
Lynxmotion BotBoarduino Shield-Compatible Robot Controller
Lynxmotion SES-V2 Arduino Compatible IO Board for LSS (LSS-2IO)
Arduino Uno R3 USB Microcontroller - Battery & Charger:
Lynxmotion SES-V2 LED Board w/ 3s 11.1V 3300mAh Li-ion Battery
B3AC LiPo Battery Charger 18W (US)
Optional
- Remote:
RadioLink T8S Bluetooth 2.4GHz 8CH Transmitter w/ R8EF 8CH Receiver
RadioLink T8FB(BT) 2.4GHz 8CH Transmitter w/ R8EF 8CH Receiver - Additional sensors:
Sharp GP2Y0A41SK0F IR Range Sensor - 4 to 30cm
Sharp IR Range Sensor - 10cm to 80cm W/ Cable
Parallax PING Ultrasonic Sensor
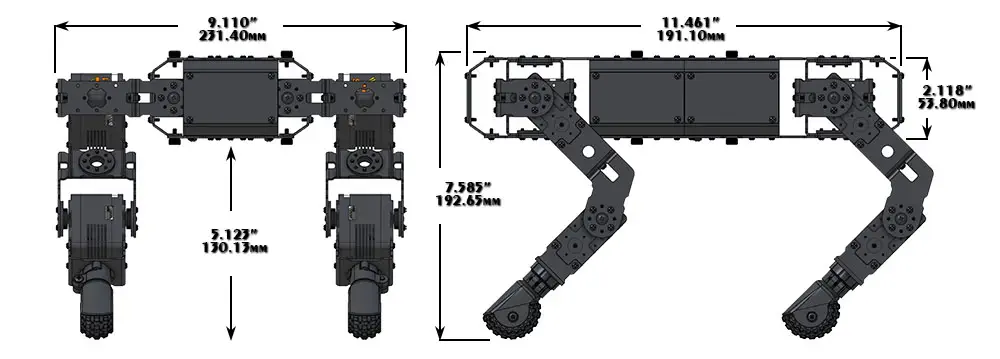
Chassis Dimensions
- Chassis length: 191.10 mm / 11.461 inches
- Chassis height: 53.80 mm / 2.118 inches
- Suggested standing height (to top of chassis): ~ 130 mm / 5.125 inches
- Weight (with battery): ~ 1.65 kg / 3.64 lbs
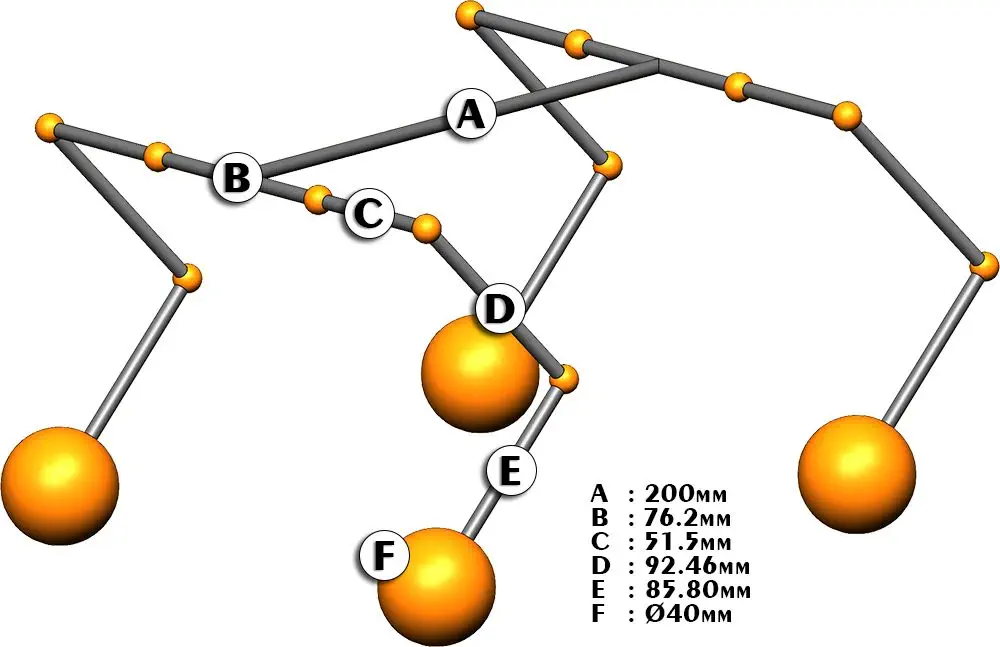
Joints Dimensions
Websites
- Lynxmotion SES-V2 mechDOG Quadruped Information & Guides
- Lynxmotion SES-V2 Legged
- mechDOG Sample Code
- mechDOG Web Interface
RobotShop Community